
§ 121. Влияние тока возбуждения на работу синхронного двигателя
При постоянной величине механической нагрузки на валу двигателя активная мощность, потребляемая двигателем из сети, остается также постоянной (если не учитывать разницы в величине потерь мощности в самом двигателе). Отсюда следует, что при любом cos φ активная составляющая тока I1, потребляемого двигателем из сети, будет постоянной (рис. 286):
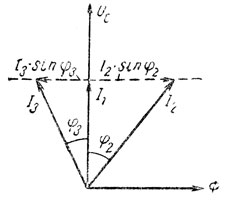
Рис. 286. Векторная диаграмма синхронного двигателя при М = const и Iр = var
В создании результирующего магнитного потока синхронного двигателя принимают участие как обмотка статора, так и обмотка ротора. Доля участия той или иной обмотки в создании результирующего магнитного потока зависит от величины тока этих обмоток. Так же как у трансформаторов и асинхронных двигателей, результирующий поток синхронного двигателя при постоянном напряжении (Uc = const) остается практически постоянным. Поэтому при изменении тока возбуждения синхронного двигателя ток статорной обмотки, т. е. ток, потребляемый двигателем из сети, будет также изменяться.
На рис. 287 дана векторная диаграмма магнитных потоков синхронного двигателя. Результирующий магнитный поток Φрез индуктирует в обмотке статора двигателя э.д.с. Eрез, отстающую от потока на 90°.
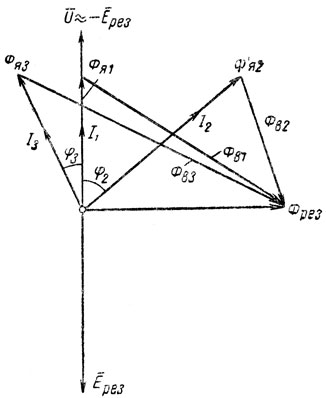
Рис. 287. Векторная диаграмма магнитных потоков синхронного двигателя
Если сопротивления обмотки статора принять равными нулю, то э.д.с. Ерез будет уравновешена напряжением сети U. Если пренебречь влиянием гистерезиса и вихревых токов, то магнитный поток статора (якоря) Φя будет совпадать по фазе с током якоря I.
Геометрическая сумма магнитных потоков статора Φя и ротора Φв даёт результирующий поток Φрез.
На диаграмме магнитные потоки представлены для трех случаев: ток якоря I1 совпадает по фазе с напряжением U; ток якоря I2 отстает от напряжения U, и ток якоря I3 опережает по фазе напряжение U.
Из рис. 287 видно, что при недовозбуждении двигатель работает как индукционная катушка, потребляя из сети ток I2, отстающий на фазе от напряжения сети Uc на угол φ2. Активная составляющая тока равна I2 cos φ2. С увеличением тока возбуждения статорный ток будет уменьшаться и при φ = 0 величина тока I1 будет наименьшей. Если продолжать увеличивать ток возбуждения, то двигатель начнет работать с опережающим током I3, т. е. будет подобен емкости (конденсатору). Активная составляющая тока I3 cos φ3 будет по-прежнему постоянна, но за счет увеличения реактивной составляющей тока I3 sin φ3 статорный ток будет увеличиваться.
Способность перевозбужденного синхронного двигателя работать с опережающим током часто используют для увеличения коэффициента мощности электрической установки.
Зависимость тока I в обмотке статора синхронного двигателя от тока возбуждения Iв при постоянном вращающем моменте М и постоянном напряжении U на зажимах двигателя, т. е.
выражается при помощи так называемых U-образных кривых, которые даны на рис. 288.
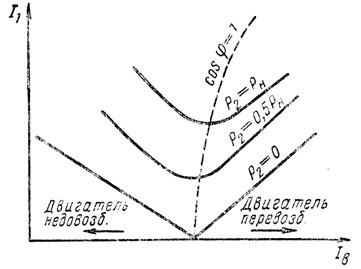
Рис. 288. U-образные характеристики синхронного двигателя
Представленные кривые показывают, что при определенной мощности на валу двигателя минимальная величина статорного тока будет иметь место при определенном токе возбуждения, соответствующем работе с cos φ = 1. Любые изменения тока возбуждения (увеличение или уменьшение) будут сопровождаться увеличением статорного тока.
В некоторых физических приборах, звуковом кино, телемеханических установках и других устройствах, там, где требуется постоянная скорость вращения, нашли себе применение маломощные, (порядка нескольких десятков или сотен ватт) реактивные синхронные двигатели. На статоре этих двигателей располагается обмотка переменного тока, создающая вращающееся магнитное поле. Ротор синхронных реактивных двигателей явнополюсный, имеет короткозамкнутую пусковую обмотку, но не имеет обмотки возбуждения. Различные конструкции роторов синхронных реактивных двигателей показаны на рис. 289.
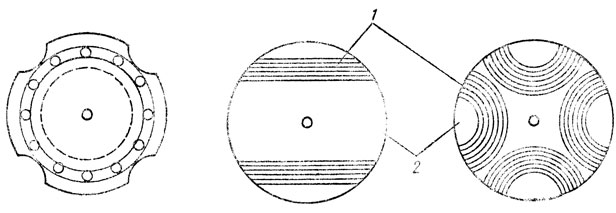
Рис. 289. Различные конструкции роторов синхронных реактивных двигателей: 1 - сталь, 2 - алюминий
За счет асинхронного момента ротор двигателя разгоняется до 95-97% синхронной скорости.
Магнитные линии вращающегося магнитного поля статора стремятся пройти по пути с меньшим магнитным сопротивлением. Поэтому ротор будет поворачиваться так, чтобы оси полюсов совпадали с направлением магнитных линий поля статора. Следовательно, ротор будет вращаться синхронно с полем статора. Вхождение ротора в синхронизм происходит толчком под влиянием реактивного момента за счет которого в дальнейшем работает двигатель.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'