
1.4. Метод компенсации
Как следует из изложенного выше, основные трудности построения схем синтезаторов связаны с фильтрацией. Поэтому в ряде устройств синтеза в качестве фильтров применяют компенсационные устройства или, сокращенно, компенсаторы [8], [28], [32], [36], [37], [39], [51]-[55]. Обычно компенсаторами заменяют только самые ответственные фильтры, однако, если требуется очень высокая степень подавления побочных составляющих, компенсаторами заменяют все фильтры (например, [36]). Следует отметить, что наиболее полный синтез систем, основанных на применении компенсаторов, изложен в работе [56].
Структурная схема простейшего компенсатора изображена на рис. 1.3a. Компенсатор состоит из входного фильтра ПФ1, на который подается сетка опорных частот, входного смесителя См1, узкополосного фильтра УПФ, выходного смесителя См2, выходного фильтра ПФ2, ряда усилителей (которые, как всегда в частном случае, могут отсутствовать) и генератора плавного диапазона ГПД, с выхода которого напряжение подается на оба смесителя.
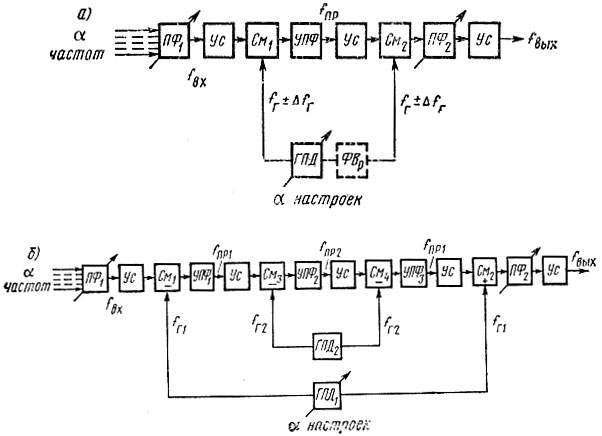
Рис. 1.3. Структурные схемы компенсаторов: а) простого; б) двойного
В смесителе См1 колебание гетеродинируется вниз по частоте, затем надежно очищается от побочных составляющих в УПФ (как правило, кварцевом), а затем в См2 гетеродинируется вверх. Фильтр ПФ1 служит лишь для такой фильтрации колебания от соседних составляющих сетки, чтобы последние не создавали на См2 продуктов, входящих в полосу пропускания УПФ. Фильтр ПФ2 служит для подавления колебаний частоты ГПД и зеркальной частоты. Если на вход компенсатора поступает сетка из а частот, то, очевидно, ГПД должен иметь а дискретных настроек. Возможны два случая расстройки ГПД относительно частот входного колебания. Если fг > fвх, то в обоих смесителях частоты fвх и fпр соответственно должны вычитаться из fг. Тогда fвых = fвх и не зависит от нестабильности Δfг. Если же fг < fвх, то в См1 осуществляется преобразование fвх-fг, а в См2 - преобразование fг+fпр. При этом также fвых = fвх и также не зависит от Δfг.
В тех случаях, когда важно, чтобы и фаза выходного напряжения компенсатора не зависела от настройки и нестабильности ГПД, можно воспользоваться методом [П2.3] и включить фазовращатель ФВр так, чтобы запаздывание fг на пути ГПД - См2 (Т2) было бы равно сумме запаздываний fг на пути ГПД - Cм1 (T1) и fпр на пути См1-См2 (Т3). При этом выходное напряжение Uвых = А cos 2π[fвх(t-Т3) + fг(T1 + T3 - T2)] = A cos 2πfвх(t - Т3).
Полоса УПФ должна быть узка настолько, чтобы с заданной степенью ослабления подавлялись побочные составляющие. Однако она должна быть не меньше, чем  где под корнем - сумма квадратов абсолютных нестабильностей входной частоты, частоты ГПД и частоты настройки УПФ. Наибольший вес имеет второе слагаемое. Следовательно, для сужения полосы УПФ необходимо уменьшать Δfг. С этой целью выгодно снижать номинальное значение fг, т. е. из двух возможных вариантов выбрать второй (fг < fвх). При необходимости вводят автоподстройку ГПД по входной частоте [28], что, конечно, значительно усложняет систему. В [39] предлагается стабилизировать кварцами все десять частот ГПД, т. е. система также усложняется.
где под корнем - сумма квадратов абсолютных нестабильностей входной частоты, частоты ГПД и частоты настройки УПФ. Наибольший вес имеет второе слагаемое. Следовательно, для сужения полосы УПФ необходимо уменьшать Δfг. С этой целью выгодно снижать номинальное значение fг, т. е. из двух возможных вариантов выбрать второй (fг < fвх). При необходимости вводят автоподстройку ГПД по входной частоте [28], что, конечно, значительно усложняет систему. В [39] предлагается стабилизировать кварцами все десять частот ГПД, т. е. система также усложняется.
Для возможности сужения полосы УПФ необходимо, кроме того, уменьшать fпр (при этом уменьшится и ΔfУПФ). Однако здесь и начинаются основные трудности реализации компенсатора. Действительно, при уменьшении fпр частоты fг и fвх сближаются и для подавления зеркальной частоты на выходе См2, имеющей удвоенную нестабильность 2Δfг, требуется узкополосный переключаемый фильтр ПФ2. Чтобы этот фильтр был простым (иначе теряется смысл в самом компенсаторе), нужно удалять fг от fвх, т. е. увеличивать fпр, что препятствует созданию хорошего УПФ.
Обычно все же удается схему больше не усложнять, хотя в необходимых случаях, когда требуется очень высокая степень фильтрации, вводят второй ГПД [52]. Схема такого компенсатора изображена на рис. 1.3б. Для этой схемы должны выполняться соотношения fг2 > fпр1, fг1 < fвх, fпр2 < fпр1, ПУПФ2 < ПУПФ1, fпр1 = fвх - fг1, fпр2 = fг2 - fпр1, fУПФ3 = fпр1 = fг2 - fпр2. Заметим, что поскольку fпр1 = const, частота ГПД2 фиксирована, а так как fпр1 может быть достаточно высокой, ПФ2 можно заменить фильтром верхних частот. Полоса УПФ2 должна быть не уже, чем  т. е. к стабильности частоты обоих ГПД предъявляются повышенные требования.
т. е. к стабильности частоты обоих ГПД предъявляются повышенные требования.
Рассмотрим построение синтезатора при использовании компенсаторов вместо узкополосных фильтров. При этом будем ориентироваться на простую схему компенсатора (рис. 1.3а). Кажущееся наиболее элементарным решение - замена входного и выходного фильтров каждой декады суммирующего устройства (см. рис. 1.2а) компенсатором (рис. 1.3а) - нельзя признать удовлетворительным, ибо устройство получилось бы слишком сложным.
Воспользуемся идеей И. Р. Сивакова [П1.1] и построим каждую декаду синтезатора так, как показано на рис. 1.4. Как видно из рисунка, в схему компенсатора добавлены смеситель См2, неперестраиваемый фильтр ПФ2 и усилитель колебаний второй промежуточной частоты. Здесь условно изображена вторая декада устройства. На смеситель См2 подается любая частота fI с выхода первой декады.
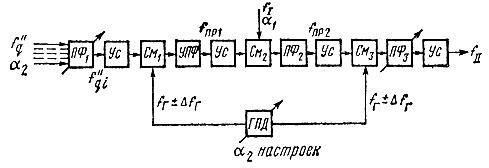
Рис. 1.4. Структурная схема декады синтезатора с использованием простого компенсатора
Напишем основные уравнения для такой декады, условившись, что fг < f"q:
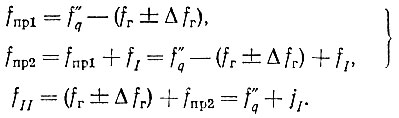
Полосы пропускания ПФ2 и ПФ3 должны быть не менее 10β1, ПФ2 должен надежно подавлять колебания частоты fпр1, а ПФ3 - колебания частоты fг. Заметим, что все три регулировки декады могут быть сопряженными.
Очевидно, частоты низшего разряда можно ввести в декаду аналогичным образом и в том случае, когда она построена по схеме рис. 1.3б. Теперь можно составить всю схему синтезатора (рис. 1.5).
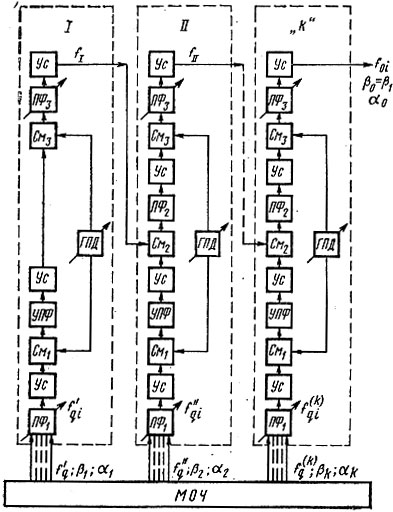
Рис. 1.5. Структурная схема синтезатора с использованием компенсаторов в декадах
Отметим достоинства и недостатки рассмотренного метода. К его достоинствам следует отнести высокую достоверность частоты, как в схемах пассивной фильтрации, повышенные по сравнению с методами пассивной фильтрации коэффициенты гармоничности колебаний в сочетании с легкостью выполнения полосовых фильтров ПФ1, ПФ2 и ПФ3, а также сколь угодно малый шаг дискретности выходных колебаний. Основными недостатками метода являются ухудшение по сравнению с методом простой пассивной фильтрации шумовых характеристик системы за счет внесения шумов ГПД, увеличение габаритов, массы и потребления энергии из-за существенного усложнения декад, уменьшение надежности, усложнение автоматической настройки и дистанционного управления в результате введения в декады ГПД и, наконец, увеличение времени смены рабочей частоты.
Таким образом, путем серьезного усложнения можно получить схему (рис. 1.5), значительно лучше других решающую первую основную задачу - подавление побочных составляющих. Однако даже это улучшение не всегда бывает достаточным [28], [36], [37]. В [57] показано, что при любом соотношении частот, подаваемых на смеситель, невозможно избежать наличия "пораженных точек". Вопрос заключается только в том, чтобы интенсивность поражения не превышала допустимой.
В [38] для облегчения фильтрации предлагается оригинальный метод. Суть этого метода заключается в замене сложения частот двух разрядов (декад), из которых одна частота обозначается "младшей" десятичной цифрой (от 1 до 4), вычитанием частоты, которая обозначается "старшей" десятичной цифрой. Например, если требуется получить частоту 81 МГц, то по существующей системе нужно произвести сложение частот 80 МГц + 1 МГц = 81 МГц (отфильтровать 81 МГц от 80 МГц), а по предлагаемой - вычитание 90 МГц - 9МГц = 81 МГц (отфильтровать 81 МГц от 90 МГц). Автор назвал эту систему "основной десятичной системой". Однако из-за наличия нулей в числах, обозначающих частоту, система для установки частоты должна иметь достаточно сложное встроенное автоматическое вычислительное устройство, что ставит под сомнение целесообразность ее практического применения.
Метод компенсации, как и метод простой пассивной фильтрации, можно использовать в любом диапазоне частот и, в частности, на СВЧ. Построение декад с повышенной степенью фильтрации (рис. 1.3б) на СВЧ также возможно.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'