
5.4. Устройства и методы борьбы с помехами от метеообразований
Одно из требований, предъявляемых к современным наземным РЛС с аппаратурой СДЦ, заключается в том, что она должна обнаруживать цель в присутствии помех от гидрометеоров, обеспечивая при этом постоянный уровень ложной тревоги. Другое требование в том, что в составе РЛС должна быть аппаратура, определяющая зоны с неблагоприятными погодными условиями и автоматически подключающая устройства, обеспечивающие работу РЛС в таких условиях.
Для компенсации помех от гидрометеоров обычно используются следующие методы и устройства:
круговая поляризация для снижения помех от дождя примерно на 20 дБ, что одновременно до некоторой степени уменьшает уровень полезного сигнала;
логарифмическая схема с малой постоянной времени (схема МПВ), обеспечивающая снижение коэффициента усиления приемника пропорционально среднему уровню помех от дождя в пределах одного-двух километров по дальности в окрестности соответствующего элемента зоны обзора. Это приводит к нормированию помех от дождя, но наблюдаемость полезных цепей в этом случае может быть обеспечена только тогда, когда уровень полезного сигнала выше уровня помех.
Излучение и прием сигнала с круговой поляризацией одного направления приводят к снижению уровня принятого от сферических дождевых капель сигнала. Измерения, проведенные с помощью антенной системы с высокой степенью развязки между приемным и передающим каналами, показывают [33], что существует естественный предел порядка 1 дБ в степени компенсации помех от дождя за счет указанного метода, что обусловливается отклонением формы капель дождя от сферической.
Кроме того, круговая поляризация вызывает снижение уровня отражений от полезных целей, в особенности зеркальных отражений от поверхности самолета. По указанной причине выгодно иметь для обработки оба вида поляризации при приеме сигналов. Когда РЛС обнаруживает присутствие атмосферных осадков в зоне обзора, то следует использовать приемный канал с наименьшим уровнем помеховых отражений. Однако в результате измерений установлено, что при обнаружении целей с радиальной скоростью, близкой к нулевой, более хорошие результаты могут быть получены при использовании линейной поляризации даже в присутствии дождя.
Проведенные эксперименты [65] показали, что процесс отражения от атмосферных осадков и процесс распространения радиолокационного излучения через них достаточно сложны и что использование круговой поляризации с целью подавления помех от дождя не является оптимальным. Если рассматривать вопрос с общих позиций, то следует отметить, что дождевые образования представляют собой анизотропную среду для распространения электромагнитных волн (капли дождя имеют приблизительно эллипсоидную форму), что в конечном итоге влечет за собой преобразование круговой поляризации в эллиптическую.
Это вызывает ухудшение компенсации за счет использования круговой поляризации по мере увеличения длины траектории распространения через дождевые образования. Следовательно, более хорошая компенсация имеет место там, где длина траектории наименьшая. Был произведен ряд экспериментов, в которых зондирующий сигнал излучался с эллиптической поляризацией, что скомпенсирует потери при распространении через дождевые образования. Таким образом, в функции оператора РЛС входила настройка эллиптичности поляризации с целью улучшения уровня компенсации помех от дождя. Улучшение компенсации больше 8 дБ в этом случае по сравнению с компенсацией, получаемой при использовании круговой поляризации, достигается достаточно просто. Однако настройка эллиптичности поляризации излучения передатчика сказывается на компенсации только в одном элементе дальности.
Как известно, сигналы, отраженные от дождя, и атмосферные осадки вообще характеризуются относительно широким частотным спектром, а также весьма высоким уровнем мощности. Это означает, что остатки помехи от дождя могут присутствовать на выходе системы СДЦ. Другое свойство сигналов, отраженных от дождя, заключается в том, что отношение между значениями его дисперсии и средней мощности является величиной постоянной, т. е. функция вероятности распределения подчиняется закону Рэлея.
По указанной причине сигнал от дождя, пропущенный через усилитель с логарифмической характеристикой, дает на выходе такой сигнал, флуктуации которого нормируются относительно постоянного уровня, зависящего от среднего значения сигнала, отраженного от дождевых капель на входе. Постоянный уровень устраняется с помощью схемы с малой постоянной времени (МПВ) (схема приведена на рис. 5.22). Если же снизить уровень флуктуации до уровня шумов системы, то тем самым можно фактически обеспечить требование ПУЛТ в присутствии и отсутствие помех от дождя.
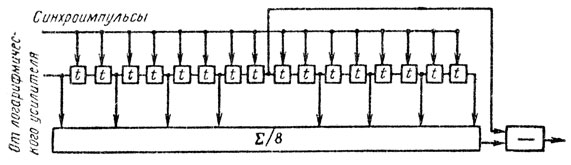
Рис. 5.22
Однако в отсутствие дождя логарифмический усилитель использовать не рекомендуется, поскольку он вносит потери на обнаружение около 2 дБ [66]. Следовательно, его необходимо включать только при наличии помех от дождя. Для обеспечения указанной функции используется датчик дождя, с помощью которого удается получить быстрое и точное решение о присутствии дождя в зоне обзора. Сигнал, несущий информацию о присутствии или отсутствии дождя, подводится к схеме выбора дальнейшей обработки сигнала: в линейном усилителе или в логарифмическом.
Таким образом, если в процессе обработки полезного сигнала не будут вводиться в действие соответствующие устройства, эффективность обнаружения может резко снизиться.
Следует отметить, что в современных РЛС [48] имеется специальный датчик, который в случае необходимости обеспечивает включение схемы "lg - МПВ" в схему обработки радиолокационных сигналов.
Рассматривая вопрос влияния логарифмического усилителя на помехи от дождя, следует также подчеркнуть важный момент, связанный с обнаружением. Обнаружение цели с заданной вероятностью ложных тревог основывается на выборе определенного порога. Величина порога зависит от уровня шумов. Следовательно, если логарифмический усилитель вводится в приемный тракт, то шумы сжимаются в соответствии с логарифмическим законом. Естественным следствием рассогласования между порогом и уровнем шумов будет уменьшение вероятности обнаружения целей.
Существуют два пути решения этой проблемы:
использование двух порогов при включении логарифмического или линейного усилителя;
использование схемы "lg-1" (схема потенцирования, которая устанавливает прежний уровень шумов).
В современных РЛС применяются оба метода [48, 49].
Так как с точки зрения обнаружения сигнала от цели помехи от дождя должны быть в максимально возможной степени скомпенсированы, то оператору необходимо иметь информацию о местоположении атмосферных осадков. Для этого в аппаратуру РЛС вводится устройство определения контуров дождевых образований, которое обеспечивает построение метеокарты контуров атмосферных осадков на экране индикаторов. Входной сигнал на это устройство подается от датчика дождя. Затем сигнал поступает в компаратор, где сравнивается с порогом. Далее в счетчике подсчитывается число превышений порога для одного элемента разрешения.
Для того элемента, в котором сумма превышений первого порога оказывается больше второго порога (после сравнений этой суммы с вторым порогом во втором компараторе), принимается решение о присутствии в нем дождя и ячейка запоминающего устройства, соответствующая данному элементу зоны обзора, заполняется двоичной единицей. Полное заполнение запоминающего устройства осуществляется за один обзор антенны РЛС.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'