
1.2. Физические основы методов обнаружения движущихся целей на фоне пассивных помех
1. Основные виды пассивных помех. Под пассивными помехами в задаче селекции движущихся целей следует понимать сигналы, отраженные от объектов, обнаружение которых не входит в функции разрабатываемой РЛС СДЦ, от подстилающих поверхностей и объемно-распределенных естественных и искусственных образований, а также сигналы, поступающие на вход РЛС, возникновение которых связано с определенными условиями распространения радиоволн.
В зависимости от причины, лежащей в основе их образования, пассивные помехи можно разбить на два больших класса: поверхностно-протяженные и объемно-протяженные. К поверхностно-протяженным помехам относятся отражения от подстилающих поверхностей: земной и морской, характеристики которых зависят либо от состояния моря, либо от вида земной поверхности. К объемно-протяженным пассивным помехам относятся отражения от метеообразований, таких как дождь, снег, град, туман, которые часто называют гидрометеорами, и от облаков диполей и металлизированных лент.
Поверхностно-протяженные и объемно-протяженные пассивные помехи необходимо учитывать при разработке на земных, самолетных и корабельных РЛС, решающих задачу СДЦ. В то же время существуют пассивные помехи, которые возникают при работе только наземной РЛС. К ним относятся помехи, которые возникают из-за отражения зондирующего сигнала от птиц (в особенности от стай перелетных птиц), скоплений насекомых, перемещающихся со скоростью ветра. Возникают отражения и от неоднородностей атмосферы или зон аномального распространения радиоволн, в которых наблюдаются интенсивные отражения от границ сред с различными показателями преломления, от турбулентных образований и от оптически ненаблюдаемых объектов (так называемые "ангелы"). Эти помехи, а также сигналы, отраженные от крупных наземных сооружений, относятся к классу сосредоточенных пассивных помех.
К пассивным помехам относятся также сигналы, отраженные от участков земной поверхности, находящихся на расстоянии, превышающем максимальную однозначно определяемую дальность обнаружения РЛС Rmax. Часто этот вид пассивных помех называется помехой на n-м ходе развертки [33].
Простейшая классификация пассивных помех представлена в табл. 1.1.
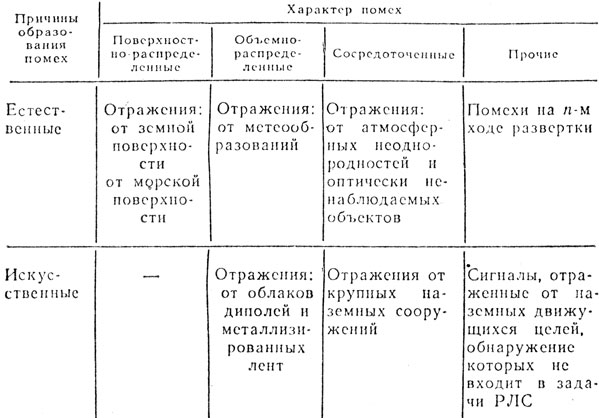
Таблица 1.1
2. Физические основы селекции движущихся целей. При разработке и синтезе систем селекции движущихся целей прежде всего необходимо четко представлять себе механизм возникновения отличительных особенностей в структуре отраженных сигналов движущихся и неподвижных целей. Эти различия являются физической основой выделения (селекции) сигналов движущихся целей на фоне пассивных помех.
Рассмотрим сигналы, отраженные от движущихся и не подвижных целей. Для простоты будем считать эти цели точечными. Если зондирующий сигнал представить как
то отраженный сигнал запишется в виде
где tR(t) = 2R (t)/c.
Если R(t) есть траектория материального тела, то она может быть лишь монотонной функцией времени. Поэтому на любом конечном интервале наблюдения функции tR(t) можно представить в виде некоторого степенного ряда:
 (1.3)
(1.3)где t(i)R - i-я производная по времени; t0 - фиксированный момент времени.
Анализ (1.3) показывает, что tR(t0) = tR. Коэффициенты ряда (1.3) будут:
при i = 0 tR(0)/0! = 1 = α0; при i = 1 tR(1)/1! = tR' = α1; . . . . . . . . . . . . . . при i = n tR(n)/n! = tR(n)/n! = αn.
Таким образом, имеем степенной ряд вида
 (1.4)
(1.4)Если сигнал излучается в момент t = 0, то он отражается от точечной цели в момент tR/2, т. е.
 (1.5)
(1.5)Дифференцируя (1.5) и подставляя t = tR, имеем:
где υr(t) - радиальная скорость; аr(t) - радиальное ускорение.
С учетом трансформации временных интервалов при движении точечной цели и при сохранении энергии сигнала необходимо ввести коэффициент трансформации временного масштаба:
При условии малости высших производных ряда (1.4) получим
При малых радиальных скоростях движения можно считать, что √γ ≈ 1, и тогда необходимо учитывать лишь временную и частотную трансформации сигнала при отражении от движущейся точечной цели.
Таким образом, в простейшем случае неподвижного объекта отраженный сигнал отличается от излученного лишь постоянным сдвигом фазы φR = 2R0ω0/c. В случае же сигнала, отраженного от движущегося объекта, кроме постоянного фазового сдвига φR, имеет место смещение круговой частоты на величину ωд = 2 υrω0/с = 2π2υr/λ, называемую частотой Доплера. Это смещение частоты используется для обнаружения сигналов движущихся целей на фоне отражений от неподвижных предметов.
Рассмотрим теперь спектральные характеристики сигнала, отраженного от неподвижной и движущейся целей. Очевидно, что спектр сигнала, отраженного от неподвижного объекта, будет совпадать со спектром излученного сигнала.
При отражении сигнала от движущейся цели его параметры, зависящие от времени (длительность импульса, период повторения и длительность пачки), изменяются: увеличиваются при удалении цели и уменьшаются при ее приближении. Соответственно изменяется и спектр F(ω) сигнала, отраженного от движущегося объекта: сжимается при удалении объекта и растягивается при его приближении. Каждая гармоника спектра fn получает смещение по частоте Fдn = 2υrfn/c и сдвиг фазы Δφn = 2R02πfn/c. Так как смещение каждой составляющей спектра пропорционально ее частоте, то все частотные интервалы спектра пропорционально изменяются в (1 + 2υr/c) раз. Радиальная скорость цели относительно РЛС считается положительной при сближении цели с РЛС и отрицательной при удалении цели.
В принципе для выделения сигналов движущихся целей можно использовать изменение несущей частоты, частоты повторения импульсов и длительности импульсов. Однако последние два эффекта очень малы и обнаружить их весьма трудно. Практически представляется возможным, применяя метод биений, зафиксировать лишь изменение несущей частоты. Таким образом, частота Доплера является основным, хотя и не единственным информативным параметром, с помощью которого осуществляется селекция движущихся целей на фоне пассивных помех.
Наблюдаемость полезных целей на фоне интенсивных помеховых отражений достигается оптимальным (для за данной помеховой обстановки) подбором параметров зондирующего сигнала, а также при оптимальной обработке по ступающих на вход РЛС сигналов. Поэтому при разработке РЛС необходим детальный анализ параметров помех и зондирующих сигналов и их зависимостей от характеристик РЛС.
Структура помеховых сигналов зависит от таких характеристик РЛС, как размер элемента разрешения, длина волны, вид поляризации, вид излучаемого сигнала, вид диаграммы направленности антенны (ДНА), частота повторения импульсов, метод обзора пространства (механическое или электронное сканирование) Она зависит также от физических параметров источника помех Физическими параметра ми источника помех являются, количество элементарных отражателей в элементе разрешения, их отражающая способность, эффективная поверхность рассеяния (ЭПР), кинематические характеристики (относительное местоположение, а также абсолютное и относительное перемещения)
В качестве примера, иллюстрирующего связь характеристик РЛС с характеристиками пассивной помехи, рассмотрим влияние на них размера элемента разрешения.
Известно, что когда элемент разрешения велик и содержит большое число отражателей, то статистические характеристики пассивной помехи с достаточной точностью описываются гауссовским законом. Если же элемент разрешения мал, то статистика помех является негауссовской. Кроме того сам источник пассивной помехи становится неоднородным и представляет собой часть пространства, которая со стоит из зон с пассивными помехами и свободных от них, а это диктует необходимость использовать для обнаружения движущейся цели то систему СДЦ, то обнаружитель на фоне собственных шумов приемника (в дальнейшем будем называть его простой обнаружитель).
Основными параметрами излучаемого сигнала, влияющими на селекцию движущихся целей на фоне распределенных помех, являются: длина волны; поляризация; частота повторения импульсов и размер элемента разрешения, однозначно связанный с длительностью излучаемого им пульса и шириной луча антенны.
При определении этих параметров необходимо учитывать, что мощность помех пропорциональна размеру (объему, площади) элемента разрешения, тогда как мощность сигнала от целей не изменяется, если цель находится в одном элементе дальности. При этом отношение сигнал-помеха по мощности для различных видов пассивных помех определяется с помощью хорошо известных соотношений:
для сосредоточенной (точечной) помехи
для поверхностно-протяженной помехи
для объемно-распределенной помехи
где Sоп - ЭПР источника помехи, м2; S - площадь элемента разрешения, м2; V - объем элемента разрешения, м3; Sоц - ЭПР цели, м2; Ss - отражающая способность поверхности (удельная ЭПР поверхности), м2/м2; Sυ - отражающая способность объема (удельная ЭПР объема), м2/м3.
Не вдаваясь в детальное обсуждение параметров Ss и Sυ, отметим, что они зависят от условий окружающей среды (от скорости выпадения осадков, состояния морской поверхности и т. п.), длины излучаемой волны и вида поляризации. Параметры S и V зависят от формы ДНА и ее характеристик, от длительности импульса и дальности элемента. Уровень мощности сигналов, отраженных от метеообразований (дождь и т. п.), можно снизить от 12 до 25 дБ относительно сигналов, отраженных от цели, если вместо линей ной поляризации использовать круговую. Помехи от метеообразований и некоторых типов атмосферных неоднородностей могут быть значительно ослаблены за счет уменьшения их ЭПР, что достигается при уменьшении несущей частоты (увеличении длины волны). ЭПР цели при этом остается неизменной.
Различный характер зависимости физических переменных для помех и сигналов, отраженных от целей, от параметров излучаемого сигнала может быть использован при решении задачи селекции движущейся цели.
Передача, прием и обработка радиолокационной информации технически реализуются при наличии аппаратурных ограничений, связанных с состоянием современной элементной базы, поэтому должны быть обеспечены условия для согласованности технических возможностей аппаратуры с наилучшим использованием информации в процессе ее обработки. В этом отношении наиболее показательным и наглядным примером является требование обеспечения линейности приемного тракта РЛС перед блоком режекции пассив ной помехи, так как в случае нелинейной обработки эффективность системы СДЦ резко снижается.
Таким образом, общая проблема селекции движущихся целей является проблемой построения РЛС, которая распадается на ряд частных проблем:
выбор (синтез) оптимального зондирующего сигнала по результатам детального анализа помеховой обстановки;
выбор (синтез) оптимальной схемы обнаружителя и определение требований к различным трактам РЛС СДЦ, при удовлетворении которых возможно функционирование оптимального (или квазиоптимального) обнаружителя;
выбор методов технической реализации собственно системы СДЦ и различных трактов РЛС.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'