
1.3. Техника селекции движущихся целей
1. Классификация РЛС СДЦ. Все радиолокационные станции селекции движущихся целей (рис. 1.1) разделяются по принципу работы на две группы: когерентные и некогерентные.
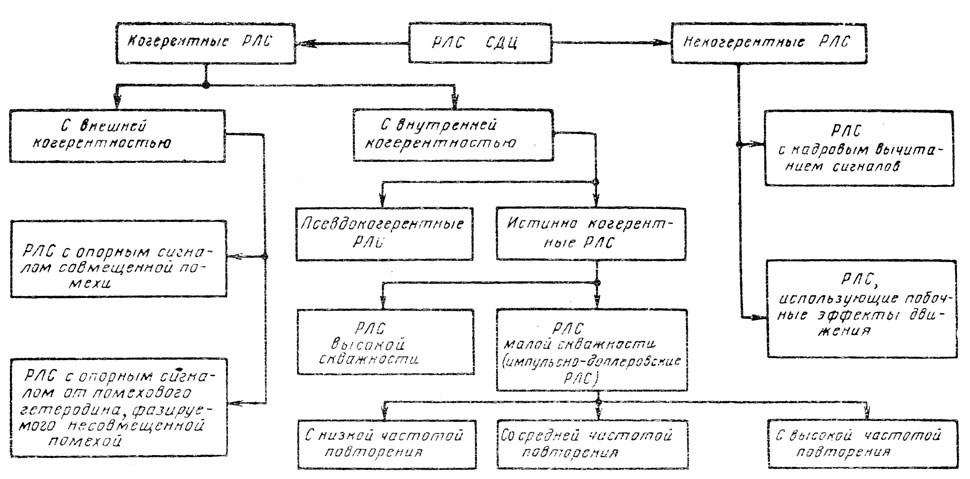
Рис. 1.1
В когерентных РЛС для селекции движущихся целей применяется принцип сравнения по фазе отраженных сигналов с опорным. При когерентности этих колебаний разность фаз сигналов, отраженных от неподвижных целей, с течением времени меняться не будет, а разность фаз сигналов, отраженных от движущихся целей, будет функцией времени. Выявляя эти различия с помощью фазового детектора, можно отселектировать (выделить) полезные сигналы движущихся целей с помощью специального фильтра.
Некогерентные РЛС используют для выделения движущихся целей не фазовую структуру на несущей частоте, а смещение огибающей сигнала за значительный промежуток времени (кадр), либо побочные эффекты движения, такие как изменение диаграммы обратного рассеяния, изменение спектра вторичных доплеровских частот, пропеллерная модуляция сигнала и др.
Когерентные РЛС, в свою очередь, подразделяются в зависимости от расположения источника опорного сигнала на РЛС с внутренней и внешней когерентностью.
В РЛС с внешней когерентностью в качестве опорного сигнала применяются сигналы, отраженные от неподвижных целей или пассивной помехи, находящиеся в одном элементе разрешения с целью (совмещенная помеха). При несовпадении в пространстве помехи и цели (несовмещенная помеха) опорный сигнал можно сформировать с помощью помехового гетеродина, фазируемого помехой, опережающей полезный сигнал.
В РЛС с внутренней когерентностью источником опорного сигнала служит когерентный гетеродин, который может фазироваться сигналом генератора радиочастоты в псевдокогерентной РЛС или служить задающим генератором многокаскадного передатчика в истинно когерентной РЛС. В свою очередь, в зависимости от скважности излучения истинно когерентные РЛС могут работать в режиме высокой (Q > 10) и малой скважности (Q < 10). В последнем случае они называются" также импульсно-доплеровскими или квазинепрерывными. В зависимости от используемой частоты повторения импульсов импульсно-доплеровские РЛС бывают с низкой (выбираемой из условия однозначности дальнометрии) с высокой (выбираемой из условия селекции движущихся целей на фоне подстилающей поверхности или из условия однозначности измерения скорости целей) и, наконец, со средней частотой повторения. Подробнее этот вопрос рассмотрен в гл. 10.
2. Устройства борьбы с пассивными помехами в различных трактах РЛС. На рис. 1.2 приведена общая структурная схема РЛС, на которой указаны основные методы и устройства борьбы с пассивными помехами в различных трактах РЛС. Ниже несколько подробнее рассматривается принцип работы каждого устройства.
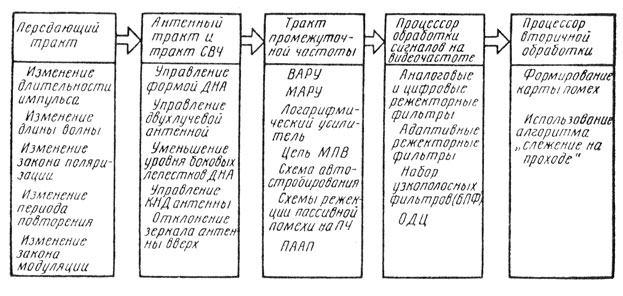
Рис. 1.2
Передающий тракт. При формировании тактико-технических требований на передающую часть РЛС СДЦ необходимо особое внимание уделять тем характеристикам зондирующего сигнала, которые позволяют уменьшить влияние пассивных помех. Однако следует учитывать и другие требования (как правило, противоречивые), предъявляемые к передатчику.
Так, при определении размера элемента разрешения по дальности δR (а фактически длительности импульса) следует иметь в виду, что его уменьшение ограничивается габаритными размерами антенны, длиной излучаемой волны, энергетическими характеристиками РЛС (мощностью в им пульсе). Использование сложного сигнала (с внутриимпульсной частотной модуляцией или фазокодовых сигналов) позволяет в известной мере примирить противоречие разрешающей способности и энергоемкости излучаемого сигнала.
При выборе длительности импульса необходимо учитывать также следующее. Контраст между сигналами, отраженными от цели и помехи, увеличивается при уменьшении τ. При этом такой контраст обратно пропорционален дли тельности импульса до тех пор, пока размер цели (самолета, вертолета и т. д.) меньше элемента разрешения по дальности δR. Поэтому с учетом линейных размеров существующих в настоящее время летательных аппаратов оптимальная дли тельность импульса находится в пределах 0,1-0,5 мкс. Однако при таких длительностях и частоте повторения им пульсов порядка 350 Гц невозможно обеспечить требуемую для обзорных трассовых РЛС УВД дальность действия до 400 км без чрезмерного увеличения импульсной мощности [49].
При выборе длины волны λ следует иметь в виду, что ее увеличение является эффективным методом борьбы с некоторыми видами пассивных помех (стаи птиц, скопление насекомых, метеообразования), однако это не всегда согласуется с другими требованиями, предъявляемыми к РЛС.
Круговая поляризация является действенным средством борьбы с отражениями от метеообразований. Эффективность такого метода зависит от коэффициента эллиптичности капель дождя, а также интенсивности осадков и степени турбулентности в пределах облака.
Вобуляция периода повторения позволяет исключить "слепые" скорости, а также повышает помехозащищенность РЛС по отношению к активным помехам. При выборе закона вобуляции необходимо учитывать такие требования, как необходимость однозначного измерения дальности, энергетические соотношения, а также сложность реализации устройства обработки отраженного сигнала.
Антенный и СВЧ тракты. Антенны современных обзорных наземных РЛС УВД, строящиеся, как правило, по двухлучевой схеме, для понижения уровня сигнала пассивной помехи должны характеризоваться следующими особенностями:
высокой крутизной нижней кромки ДНА, что приводит к быстрому повышению степени контраста сигнала от цели при увеличении угла между целью и подстилающей поверхностью;
возможностью автоматического управления ДНА, что позволяет осуществлять переключение лучей, перекрывающих пространство обзора на малых и относительно больших углах места, а также формировать несколько (обычно три) ДНА.
Современные РЛС УВД используют для борьбы с пассивными помехами устройство управления нижней кромкой ДНА.
Причиной значительного снижения эффективности работы РЛС СДЦ могут служить сигналы соседних РЛС, принятых по боковым лепесткам ДНА. Сигналы подобного типа являются асинхронными по отношению к полезным сигналам, а их уровень на входе приемника пропорционален коэффициенту усиления антенны в направлении на источник излучения. Двухлучевые антенные системы с комбинированной ДН позволяют уменьшить уровень помех подобного типа. Управление коэффициентом направленного действий (КНД) антенны, а также уменьшение уровня боковых лепестков ДНА являются действенной мерой борьбы с импульсными помехами. Кроме того, эти помехи могут быть подавлены в устройстве обработки.
Не утратил своего значения в борьбе с пассивными помехами такой метод, как отклонение зеркала антенны вверх. Он является чрезвычайно простым и дешевым методом ослабления помех при малых углах места. Однако необходимо учитывать, что при этом ослабляются и сигналы от цели.
Тракт промежуточной частоты. В рамках проблемы борьбы с пассивными помехами на тракт промежуточной частоты возлагается решение следующих задач:
обеспечение линейности обработки поступающей радио локационной информации;
обеспечение постоянного уровня ложных тревог;
подавление пассивных помех с помощью устройств, функционирующих на промежуточной частоте.
В настоящее время на практике находят применение два основных метода уменьшения перегрузки отражениями от местных предметов. Первый способ состоит в использовании системы мгновенной автоматической регулировки усиления (МАРУ) для поддержания средней амплитуды отражений на постоянном уровне. Второй заключается в применении усилителя промежуточной частоты (УПЧ) с логарифмической характеристикой усиления. Однако оба метода требуют дополнительных схем для устранения перегрузки.
Если отражения при различных азимутах однородны и монотонно изменяются в зависимости от дальности, то используется третий метод - временная автоматическая регулировка усиления (ВАРУ). При этом обычно обеспечивается зависимость коэффициента усиления в соответствии с законом Rn, где n = 2, 3, 4, так что средний уровень помех после временной регулировки становится более равномерным, а при определенных условиях даже постоянным. Схема ВАРУ является простейшим устройством, алгоритм работы которого не учитывает характеристики излученного сигнала, а основывается только на априорных сведениях.
Здесь следует указать на то, что кроме общих пределов изменения амплитуды отражений от местных предметов, которое может потребовать применение схем автоматической регулировки усиления приемника в той или иной форме, важно знать скорость этого изменения. Эта скорость определяет быстроту срабатывания автоматической регулировки усиления (АРУ), необходимую для обеспечения удовлетворительной работы приемника.
Существующие схемы ВАРУ поддерживают среднюю мощность помехи на постоянном уровне за счет соответствующего ослабления помехи по развертке дальности. Однако мощность помехи изменяется в зависимости от различных факторов помехи: состояния морской поверхности, скорости ветра, интенсивности метеоосадков и т. д. В этом случае необходимо использовать схемы адаптивного ВАРУ, закон функционирования которого задается в реальном масштабе времени с помощью устройства оценки мощности помехи. В качестве простейшей адаптивной ВАРУ в современных РЛС применяется цепь "lg - МПВ - lg-1", где lg - логарифмический усилитель; МПВ - цепь с малой постоянной времени; lg-1 - операция потенцирования. Цепь МПВ можно рассматривать как приближение к комбинации интегрирующего и вычитающего звеньев, где назначение интеграторов - запоминать медленно меняющееся напряжение, характеризующее среднюю интенсивность помех от окружающих местных предметов [8].
В последних разработках обзорных РЛС УВД [48, 49, 55] в тракт промежуточной частоты включается схема временной автоматической регулировки усиления, называемая программируемым адаптивным аттенюатором пассивных помех (ПААПП). Это устройство позволяет подавлять помехи в зависимости от конкретной помеховой обстановки, в которой функционирует РЛС. Выбор алгоритма функционирования ПААПП осуществляется отдельно для каждого дальностно-азимутального элемента зоны обзора РЛС на основе информации, хранящейся в устройстве формирования карты помех.
Обработка сигналов в видеотракте. Наиболее распространенным устройством для выделения движущихся целей является схема с череспериодным вычитанием сигналов, включаемая после фазового детектора.
Структуры оптимальных процессоров хорошо известны, однако аппаратурная реализация их была осуществлена только в последние годы. Достаточно хорошей аппроксимацией оптимального процессора является устройство СДЦ, при расчете характеристики которого учитывается корреляционная функция помехи и ДНА РЛС, и последовательно включенный за ним набор доплеровских фильтров, перекрывающих весь диапазон однозначного определения радиальной скорости. Что касается порогов обнаружения для каждого фильтра, то здесь справедливы следующие соображения: если в полосе фильтра имеют место только шумы приемника, то можно выбрать фиксированный порог, а если присутствуют шумы другого происхождения, имеющие определенные статистические характеристики, которые монотонно изменяются по дальности, то необходимо ввести для каждого фильтра собственное пороговое значение.
При применении устройств СДЦ подавляются сигналы и от некоторых представляющих интерес целей, и, наоборот, через фильтр СДЦ проходят сигналы от нежелательных подвижных объектов, например от птиц и автомашин. Методика устранения перечисленных недостатков традиционных устройств СДЦ уже разработана и наиболее полно реализована в устройстве, названном обнаружителем движущихся целей (ОДЦ) [50]. Обработке радиолокационной информации с помощью ОДЦ свойственны три следующие особенности:
режекторный фильтр СДЦ заменяется (или дополняется) несколькими доплеровскими узкополосными фильтрами, реализованными с помощью БПФ. Выходные пороги устанавливаются таким образом, чтобы обеспечить постоянную вероятности ложной тревоги для каждого участка "дальность - скорость" с целью адаптации к помехам, создаваемым облаками метеообразования (дождь, снег) и диполями;
данные от режекторного фильтра позволяют сформировать карту помех, которая содержит среднее значение помехового сигнала в каждом разрешаемом объеме "азимут - дальность";
выходной сигнал, получаемый при каждом обзоре, сравнивается с трассами обнаруженных целей и в дальнейшем используется для выделения тех целей, которые представляют интерес по своим скоростным характеристикам. Таким образом, птицы и наземный транспорт исключаются из возможных целей.
Блок формирования карты помех от земной поверхности. Для стационарных обзорных РЛС подобная карта, состоящая из выборки для каждого элемента дальности зоны обзора или группы элементов, может быть построена на основе анализа и запоминания радиолокационной информации, поступающей от обзора к обзору. Для каждого элемента или группы элементов отраженные сигналы за несколько обзоров усредняются.
Блок сопровождения целей "на проходе". Сопровождение целей "на проходе", т. е. в процессе последовательных обзоров с помощью обзорной РЛС, в отличие от непрерывного сопровождения цели, когда антенна РЛС не "теряет" цель и все время направлена на нее, представляет собой алгоритм сопровождения, в который постоянно вводятся данные о местоположении цели или целеуказания. Такими данными являются: параметры целеуказания (дальность и азимут), а иногда и скорость движения цели (которая определяется на основе методов, связанных с доплеровским сдвигом частоты).
После соответствующей обработки данных целеуказания формируется информация сопровождения: сглаженные и экстраполированные данные о местоположении и скорости цели. Новые данные целеуказания могут быть связаны с некоторой траекторией цели. Это означает, что может быть принято решение, согласно которому целеуказание текущего обзора относится к уже обнаруженной соответствующей траектории.
Рост эффективности обнаружения происходит по следующим причинам:
если новое целеуказание не относится ни к одной из имеющихся траекторий целей, то начинает формироваться новая траектория;
перед принятием решения, подтверждающего наличие данных о траектории новой цели, должно пройти несколько обзоров, количество которых определяется соображениями, касающимися функционирования РЛС в целом;
в течение указанных обзоров производится проверка ряда факторов, которые должны с определенной степенью достоверности подтвердить наличие траекторных данных.
Следовательно, целеуказания, обусловленные только пассивными помехами, в общем случае не могут вызвать формирование траектории, подобной той, которая формируется при наличии истинной цели.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'