
6.2. Оптимизация весовых функций линейного режекторного фильтра
Обозначим сигнал, поступающий на вход линейного фильтра в дискретные моменты времени, как
где n(t) - стационарный случайный гауссовский процесс; φ - случайный параметр сигнала. Предположим также, что принимается ограниченная последовательность импульсов (пачка из n импульсов). Сигнал на выходе фильтра определяется соотношением
 (6.2)
(6.2)где
un = {u1, u2, ..., un} = {x1, x2, ..., xn) + i {y1, y2, ..., yn}
комплексная весовая функция или вектор; un - комплексные числа; x и y - действительные числа.
Очевидно, что действительные и мнимые части весовой функции должны быть объединены с тем, чтобы сформировать физически реализуемую величину.
Средняя мощность на выходе фильтра
 (6.3)
(6.3)где "*" означает комплексно-сопряженную величину; (¯) - операцию статистического усреднения по φ или по {n(t)}. Как отмечалось выше, предполагается, что n(t) - стационарный случайный процесс в широком смысле, с нулевым средним значением и корреляционной функцией вида
где ρ(τ) - нормированная корреляционная функция.
С учетом сделанных замечаний соотношение (6.3) может быть записано следующим образом:
 (6.5)
(6.5)Очевидно, что отношение сигнал-помеха на выходе фильтра на определенной доплеровской частоте равно отношению первого слагаемого в (6.5) ко второму:
 (6.6)
(6.6)где
 (6.7)
(6.7)Отношение сигнал-помеха на входе линейного фильтра
 (6.8)
(6.8)Таким образом, эффективность линейного режекторного фильтра можно определить через коэффициент улучшения для заданной доплеровской частоты:
 (6.9)
(6.9)Здесь
 (6.10)
(6.10) (6.11)
(6.11)Величина (Кп)n не зависит от характеристик сигнала, а для фиксированного значения n зависит только от ρ(τ) и {Un}. Коэффициент (Ks)n для фиксированного n зависит только от характеристик сигнала и от {Un}. Желательно, чтобы критерий оптимальности не зависел от характеристик сигнала. Тогда оптимальной весовой функцией, которая определяется вектором {Un}, будет функция, максимизирующая величину (Кп)n.
Основной недостаток приведенного определения заключается в том, что оптимальная весовая функция может сформировать небольшое значение коэффициента (Ks)n, что, в свою очередь, несколько снизит Ку(fд). Однако это неизбежно и является ценой за введение такого критерия оптимальности, который не зависит от характеристик сигнала.
Из (6.10) следует, что (Кп)n - обратная нормированная квадратичная форма. Ее максимальное значение равно обратному наименьшему собственному значению корреляционной матрицы
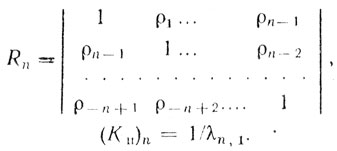 (6.12)
(6.12)Это справедливо в том случае, когда {Un} является собственным вектором, соответствующим данному собственному значению [70]. Так как Rn - неотрицательно определенная матрица, то ее собственные значения являются действительными и неотрицательными числами. Определим оптимальные весовые функции для корреляционных матриц при n = 2 и 3 [70].
При n = 2  (6.13)
(6.13)
Собственные значения удовлетворяют уравнению
 (6.14)
(6.14)так что:
Элементы собственного вектора U2 должны удовлетворять уравнению
поэтому
Таким образом, при n = 2 оптимальный фильтр формирует разность от импульса к импульсу при ρ1 > 0 и сложение от импульса к импульсу при ρ1 < 0.
 (6.20)
(6.20)Собственные значения удовлетворяют уравнению
которое может быть записано в виде

и, следовательно, собственные значения:

Составляющие собственного вектора U3 удовлетворяют уравнениям:

так что
 (6.21)
(6.21)Рассмотрим теперь на простых примерах, как можно использовать полученные результаты при определении параметров линейного режекторного фильтра.
Пусть S(t, φ) = A cos (ωдt + φ), где ωд - частота Доплера; φ - случайная начальная фаза, значения которой равномерно распределены в интервале 0 - 2π.
Очевидно, что
 (6.22)
(6.22)и
 (6.23)
(6.23)если n = 2 и ρ1 > 0, оптимальная весовая функция задается (6.18). Это соответствует схеме однократной ЧПК. Коэффициент Ksn(ωд) = 1 - cos ωдTп.
Если n = 3 и 0 ≤ ρ2 ≤ ρ1 < 1, то оптимальные веса определяются соотношением (6.21). Если ρ1 и ρ2 близки к единице, то оптимальная схема обработки соответствует схеме двухкратной ЧПК с весами 1: -2: 1, для которой

Выше отмечалось, то процедура оптимизации требует точного знания доплеровской частоты сигнала. Кроме того, рассматривалась, равномерная последовательность зондирующих импульсов. Теперь приведем решение задачи максимизации Ку с помощью оптимального выбора весовых коэффициентов для вобулированной последовательности импульсов при неизвестной доплеровской частоте.
Выражение для Ку(ωд) можно записать следующим образом:
 (6.24)
(6.24)Для данного частотного диапазона с граничными частотами f1 и f2
 (6.25)
(6.25)Отметим, что
 (6.26)
(6.26)Примем Δf = f2 - f1; fcp = 0,5 (f2 - f1). Тогда выражение (6.25) приведем к виду
 (6.27)
(6.27)И, наконец,
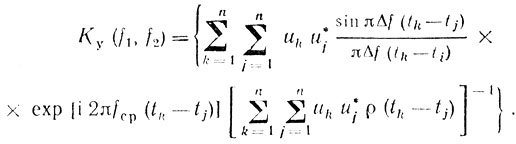 (6.28)
(6.28)Запишем (6.28) в матричной форме, для чего определим вектор-столбец
 (6.29)
(6.29)а также матрицы В и R:
 (6.30)
(6.30)Тогда
 (6.31)
(6.31)Максимальное значение Ку(f1, f2) достигается при максимальном собственном значении матрицы R-1B, а максимальное собственное значение достигается, когда U является собственным вектором, соответствующим наибольшему собственному значению.
Процедура определения оптимальных весов для каждого частотного диапазона может быть представлена следующим образом:
1. Определяются ширина полосы каждого диапазона Δf = f2 - f1 и среднее значение fср = 0,5 (f1 + f2).
2. Определяются моменты появления зондирующих им пульсов tk.
3. Сопоставляется корреляционная матрица R размером n×n, элементы которой ρ(tk - tj).
4. Составляется корреляционная матрица В размером n×n, элементы которой определяются соотношением (6.30).
5. Составляется матрица произведения R1_B.
6. Определяется наибольшее собственное значение произведения матриц R-1B, а затем находится собственный вектор, соответствующий этому собственному значению. Собственный вектор является комплексным.
Указанная процедура повторяется для каждого из N частотных диапазонов. Максимальное количество частотных диапазонов задается соотношением
 (6.32)
(6.32)где Ti - период следования импульсов. Ширина одного частотного диапазона
 (6.33)
(6.33)Число и ширину частотных диапазонов необходимо определять с учетом необходимого значения коэффициента улучшения и объема аппаратурных затрат.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'