
9.6. Нелинейное уравнение автогенератора
В предыдущих параграфах данной главы изучались условия возникновения колебаний и определялась устойчивость стационарного режима автогенератора. Необходимо рассмотреть весь процесс установления автоколебаний: от включения до установления стационарного режима. Это важно для ряда приложений, когда приходится иметь дело с формированием коротких радиоимпульсов (например, в импульсных радиосистемах). Для полного описания работы автогенератора, охватывающего все стадии процесса установления, необходимо отказаться от условия малости амплитуд, лежащего в основе линейного дифференциального уравнения (9.9').
Использованное при составлении этого уравнения линейное выражение (9.6)

необходимо заменить нелинейной функцией

определяющей анодный ток iа при любых значениях uск и uак.
Для дальнейшего исследования удобно перейти от схемы, изображенной на рис. 9.3, а, к схеме, показанной на рис. 9.16. Использованная в этой схеме параллельная схема замещения колебательного контура, не меняя сути дела, упрощает составление дифференциального уравнения для напряжения uак, действующего на контуре. При выбранных направлениях токов и напряжений можно написать следующие исходные уравнения:


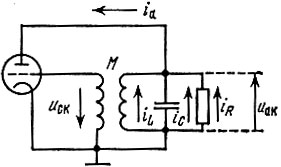
Рис. 9.16. Схема замещения автогенератора, соответствующая уравнению (9.29)
Подставляя выражения (9.26) и (9.28) в (9.27), получаем

Преобразуем теперь аргумент нелинейной функции ψ, выразив uск через uак. Непосредственно из схемы с трансформаторной связью (рис. 9.16) вытекает соотношение uск = М (diL/dt), а из третьего равенства (9.28) следует, что diL/dt = uак/L. Следовательно, uск = uакM/L.
Итак,

Заметим, что если не учитывать влияние uак на ток iа (при D << Кос), то uск ≈ Косuак.
Введем обозначение

Тогда

Подставляя это выражение в (9.29) и дифференцируя последнее по t, получаем

или

Как и следовало ожидать, получилось нелинейное уравнение. Дальнейший путь заключается в подстановке в уравнение (9.32) какой-либо подходящей аппроксимации функции ψ(К'осuак).
Наиболее удобной является аппроксимация с помощью степенного полинома. Чтобы не слишком усложнять задачу, обычно исходят из неполного полинома третьей степени [см. (8.13)]:

Входящее в выражение (8.8) слагаемое i(U0) опущено, так как оно не оказывает влияния на поведение функции uак. Знак минус перед кубическим членом взят в соответствии с формулой (8.14).
Аппроксимация (9.33) пригодна при фиксированном положении рабочей точки на вольт-амперной характеристике (в точке перегиба, см. рис. 8.5). Следовательно, при этом не учитывается изменение напряжения смещения U0 в процессе нарастания амплитуды колебания (при автоматическом смещении). Тем не менее, как показывает опыт, аппроксимация (9.33) все же позволяет выявить основные черты процесса установления колебаний в генераторе, работающем в мягком режиме.
Подставляя (9.33) в (9.32), получаем

или

где использованы обозначения

Заметим, что в самовозбуждающемся генераторе αэкв < 0 (см. § 9.2).
Разделив (9.34) на ω02 и введя малый параметр

получаем

Переходя, наконец, к безразмерному времени τ = ω0t, получаем уравнение, известное под названием уравнения Ван дер Поля:

При малых напряжениях, когда  уравнение (9.37) переходит в линейное уравнение, совпадающее с уравнением (9.9') при переходе в последнем к безразмерному времени, а также при учете различия между схемами на рис. 9.3 и 9.16]. С увеличением амплитуды напряжения uак все сильнее проявляется нелинейность системы, обусловленная величиной (γэкв/2|αэкв|) u2ак.
уравнение (9.37) переходит в линейное уравнение, совпадающее с уравнением (9.9') при переходе в последнем к безразмерному времени, а также при учете различия между схемами на рис. 9.3 и 9.16]. С увеличением амплитуды напряжения uак все сильнее проявляется нелинейность системы, обусловленная величиной (γэкв/2|αэкв|) u2ак.
Методов, позволяющих получить точное решение нелинейного уравнения (9.37), не существует.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'