
3. Обратная связь
Системы автоматического управления часто называют системами с обратной связью. Это объясняется тем, что в любой системе автоматического управления* имеется не только прямая (рис. В.1) связь между входом (управляющим воздействием) и выходом (регулируемой величиной), но и обратная связь между выходом и входом. Обратная связь позволяет учитывать изменение регулируемой величины (параметра) и вносить соответствующие коррективы в управляющее воздействие на входе объекта.
* (Исключение составляют так называемые программные системы; однако эти системы не являются кибернетическими и работают по заранее заданной неизменной программе.)
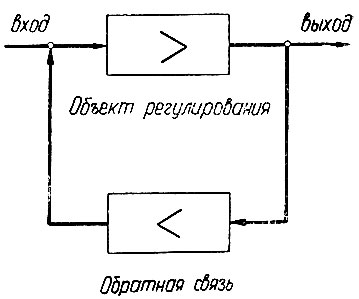
Рис. В.1. Обратная связь в системах автоматического управления
Важность принципа обратной связи заключается в том, что он имеет место не только в системах автоматического управления, но и в живых организмах. Принцип обратной связи является общим как для живых организмов, так и для систем управления, потому что и те, и другие вынуждены действовать в переменных условиях и соответственно реагировать на их изменение.
Рассмотрим в качестве примера работу двигательных мышц ног у стоящего человека при регулировании им равновесия.
Для того чтобы поддерживать равновесие в положении стоя, необходимо осуществлять регулирование напряжения различных скелетных мышц. Это регулирование осуществляется при помощи спинного мозга (рис. В.2), который дает соответствующие "команды" мышцам. На мозжечок поступает информация о том, что при этом происходит с равновесием человека (как он отклоняется от нормального положения). Мозжечок перерабатывает эту информацию и дает необходимые "указания" спинному мозгу. В соответствии с этими "указаниями" спинной мозг вносит коррективы в команды, посылаемые мышцам. Таким образом, спинной мозг, мышцы и мозжечок образуют замкнутую систему управления равновесием человека. В этой системе мозжечок является элементом, обеспечивающим обратную связь выхода системы с ее входом.
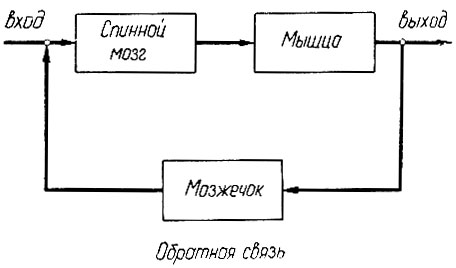
Рис. В.2. Схема регулирования равновесия стоящего человека
Рассмотрим еще один пример обратной связи. Предположим, что человеку необходимо нажать кнопку звонка. Головной мозг (рис. В.3) дает необходимые сигналы мышцам руки, и она начинает двигаться к кнопке звонка. Глаза наблюдают за движением руки и сообщают о нем мозгу, который вносит коррективы в работу мышц. Благодаря этому рука точно попадает на кнопку звонка. В том случае, если бы человек закрыл глаза ("отключил" контур обратной связи), он не смог бы попасть рукой на кнопку. Естественно, что можно и с закрытыми глазами найти "на ощупь" кнопку. Однако в этом случае также имеется обратная связь, которая на этот раз осуществляется органами осязания.
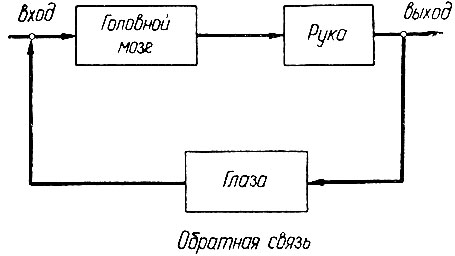
Рис. В.3. Глаза человека в роли элемента обратной связи
Аналогичным образом работает обратная связь и в системах автоматического управления, Рассмотрим в качестве примера систему управления электрическим двигателем (рис. В.4). В этой системе логическо-вычислительное устройство измеряет параметры на валу двигателя (скорость вращения, ускорение, вращающий момент), производит необходимые вычисления, логические сравнения и обеспечивает управление магнитным усилителем. Благодаря этому магнитный усилитель изменяет необходимым образом характеристики двигателя.
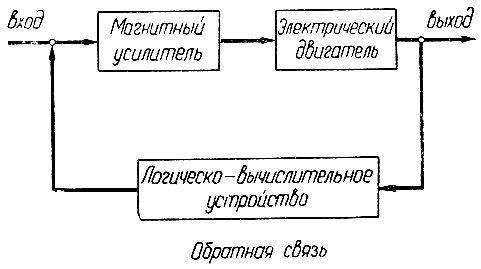
Рис. В.4. Обратная связь в системе управления двигателем
Следует отметить, что как в живых организмах, так и в системах автоматического управления элементы, как правило, имеют определенную направленность действия. Если глаза (рис. В.3) передают информацию в мозг, то обратное действие мозга (по тем же каналам) на глаза отсутствует. Точно так же в схеме рис. В.4 магнитный усилитель управляет электрическим двигателем, но двигатель практически не воздействует на характеристики усилителя. То же самое следует сказать и об элементах обратной связи, которые осуществляют только одностороннюю связь выхода со входом, но не дают возможности воздействия через обратную связь входа на выход.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'