
6. Преобразование непрерывных сигналов в дискретные
Использование различного рода датчиков позволяет получить напряжения, величины которых пропорциональны соответствующим параметрам регулируемого объекта. Такие датчики измеряют перемещение, температуру, давление и множество других параметров, которые непрерывно изменяются во времени.
Для того чтобы использовать полученную информацию в дискретных устройствах автоматического управления, необходимо имеющийся непрерывный сигнал преобразовать в дискретный (осуществить квантование сигнала).
Имеется довольно большое количество аппаратов, осуществляющих рассматриваемое преобразование. Эти аппараты могут быть созданы на основе электронных или электромеханических устройств. Электронные преобразователи характеризуются тем, что они способны выполнять до миллиона двоичных преобразований в секунду. Кроме того, поскольку электронные преобразователи могут быть бесконтактными (не иметь подвижных контактов), они значительно надежнее в работе, нежели механические. Однако следует иметь в виду, что в ряде случаев электромеханические преобразователи оказываются проще и дешевле электронных. Поэтому выбор типа преобразователя зависит от конкретной задачи, поставленной перед ним.
В настоящее время в основном применяются два способа преобразования непрерывных сигналов в дискретные: время-импульсный метод и метод ступенчатой компенсации напряжения. Рассмотрим сущность этих методов.
а) Время-импульсный метод
Принцип действия время-импульсного метода основан на следующем. Возьмем генератор линейно изменяющегося напряжения. Этот генератор создает периодическое напряжение (рис. 1.4), которое в течение определенного интервала времени (τ), называемого рабочим ходом, нарастает пропорционально времени. После этого напряжение генератора (обратный ход) уменьшается до нуля и затем вновь начинает линейно возрастать.
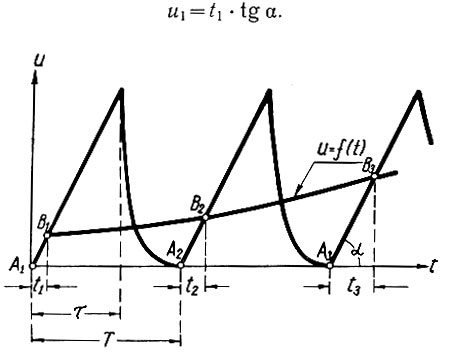
Рис. 1.4. Схема сравнения двух напряжений
Наложим на полученное напряжение непрерывно изменяющееся напряжение u = f(t), которое необходимо преобразовать в дискретную форму.
В точках В1, В2, B3 и т. д. эти напряжения оказываются равными. Поэтому в точке В1 напряжение равно
Поскольку угол наклона (α) линейно нарастающего напряжения является постоянной величиной, то можно сказать, что величина напряжения в точке В1 в соответствующем масштабе равна отрезку времени t1. Благодаря этому схема преобразования непрерывно изменяющегося напряжения в дискретное может быть выполнена следующим образом.
Датчик импульсов (рис. 1.5) через определенные интервалы времени подает импульсы на счетчик. Одновременно этот датчик включен на пересчетное устройство, сигнал на выходе которого появляется через n импульсов, т. е. через время, равное
где fи - частота импульсов, генерируемых датчиком.
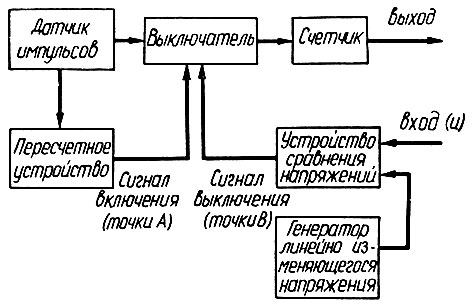
Рис. 1.5. Схема время-импульсного метода преобразования
Сигнал на выходе пересчетного устройства является сигналом включения датчика импульсов на счетчик в точках А (рис. 1.4).
На вход устройства сравнения напряжений подаются два сравниваемых напряжения: линейно изменяющееся напряжение и напряжение, которое необходимо преобразовать в дискретную форму (u). В тот момент, когда эти напряжения оказываются равными (точки В рис. 1.4), устройство логического сравнения подает импульс на выключатель. Этот импульс является сигналом отключения датчика импульсов от счетчика.
Таким образом, выключатель пропускает на счетчик такое количество импульсов, которое пропорционально величине измеряемого напряжения в точке В. Подсчитав число этих импульсов, счетчик дает на выходе величину напряжения (u) в дискретной форме. Причем тип счетчика определяет систему кодирования этого напряжения. Так, например, если в схеме установить двоичный счетчик, то напряжение будет представлено в двоичном коде. После выдачи сигнала счетчик сбрасывается на нуль и вновь готов для подсчета напряжения (u) в следующем интервале.
Преимуществами время-импульсного метода являются простота схемы и легкость изготовления аппаратуры. К недостаткам метода следует отнести сравнительно невысокую точность, получение отсчетов через неравные интервалы времени и неоднозначность отсчетов.
Отсчеты через неравные интервалы времени происходят из-за того, что линейно изменяющееся напряжение является лишь приблизительно линейным. Кроме того, положение точки начала счета импульсов (точка А) определяется недостаточно точно. Чтобы точно установить положение этой точки, нужна специальная схема.
Неоднозначность отсчетов происходит вследствие того, что быстродействующий счетчик может успеть отсчитать некоторое Дополнительное число импульсов за время действия сигнала, подающего команду отключения датчика импульсов.
б) Метод ступенчатой компенсации напряжения
Метод ступенчатой компенсации основан на сравнении мгновенных значений преобразуемого непрерывного напряжения (и) с рядом эталонных напряжений. В качестве эталонных выбираются напряжения вида uэт = 2k, где k - любое целое положительное число. Таким образом, эталонными являются напряжения:

Сравнение преобразуемого напряжения с эталонными выполняется по следующим логическим правилам.
Берется наибольшее из имеющихся в схеме эталонных напряжений (uэтk) и проводится сравнение.
1. Если u ≥ uэтk, то в k-ом разряде выдается единица и для дальнейшего сравнения берется сумма двух эталонных напряжений
2. Если u << uэтk, то в высшем, k-ом, разряде выдается сигнал нуля и далее берется для сравнения следующее меньшее значение эталонного напряжения 
3. Далее, в зависимости от результатов в пунктах 1 и 2 аналогичные сравнения проводятся по одному из условий

если соответствующее неравенство выполнено, то в разряд "k-1" подается единица, если нет, то - нуль.
4. Аналогичные сравнения проводятся с суммами всех низших разрядов.
Пример. Преобразовать в двоичную дискретную форму значение напряжения u = 58 в.
Эталонные напряжения, имеющиеся в преобразующем аппарате, равны 1, 2, 4, 8, 16, 32 и 64 в.
Работа аппарата разбивается на следующие этапы (табл. 1.2).
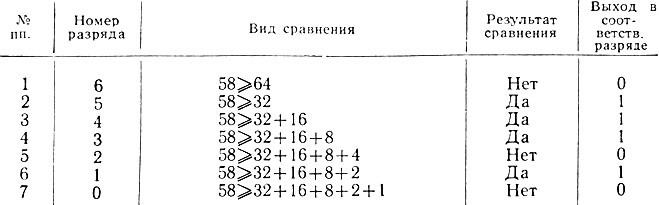
Таблица 1.2. Логическая схема преобразующего аппарата
Таким образом, осуществляется преобразование:

Так как импульсы выдаются аппаратом последовательно, то говорят, что аппарат имеет последовательный во времени выход.
При использовании электронно-лучевого коммутатора метод ступенчатой компенсации позволяет выполнять кодирование со скоростью до 100000 операций в секунду. Точность преобразования, выполняемого этим методом, выше, чем время-импульсным методом, ибо она ограничена только точностью эталонного напряжения и схемы сравнения.
Недостатком этого метода является необходимость применения относительно сложной логической схемы.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'