
6. Логические бесконтактные элементы в дискретных системах автоматического управления
До последнего времени большинство логических операций в системах автоматического управления выполнялось преимущественно при помощи электромагнитных реле, т. е. с применением механических подвижных контактов. Наличие этих контактов значительно снижало надежность систем автоматического управления, а индуктивность катушек реле приводила к уменьшению быстродействия систем.
Создание электронных логических элементов и бесконтактных переключающих устройств позволяет заменить громоздкие релейные механизмы более надежными, легкими, компактными и быстродействующими элементами.
Бесконтактный элемент, не имеющий движущихся контактов, является в механическом отношении статическим устройством.
В качестве бесконтактных элементов схем управления применяются вакуумные и газоразрядные лампы, магнитные усилители и полупроводниковые приборы. Хотя магнитные усилители и полупроводниковые приборы не являются идеальными выключателями (в отключаемой ими цепи ток не уменьшается до нуля), но благодаря высокой механической прочности и большому сроку службы они получают наибольшее распространение.
Использование в системах автоматического управления стандартных логических элементов значительно сокращает время, необходимое для проектирования систем. Кроме того, облегчается ремонт систем, ибо в этом случае он сводится к замене вышедших из строя элементов новыми стандартными элементами.
В последнее время появились новые конструкции электронных логических элементов, называемые "твердыми" схемами. В этих схемах нет отдельных сопротивлений, диодов, триодов и т. д. Чаще всего "твердая" схема представляет собой пластинку германия или кремния, по площади не превышающую поперечного сечения спичечной головки. На такой пластинке при помощи травления, диффузии и другими способами формируются диоды, триоды, конденсаторы и сопротивления. Благодаря этому один кристалл, не имеющий соединительных проводов, может выполнять очень сложные логические преобразования. Поскольку "твердые" схемы не имеют ни одной пайки, они обладают исключительно большой надежностью и поэтому в ближайшее время получат очень широкое применение в системах автоматического управления.
Рассмотрим вначале простейшие релейные схемы и логические элементы, заменяющие их. Так как эти логические элементы выполняют те же функции, что и релейные схемы, то они называются аналогами релейных схем.
Пусть в системе автоматического управления имеется цепь, в которой (рис. 2.35) последовательно включено три реле с нормально разомкнутыми контактами. Ток в этой цепи появится только тогда, когда будут поданы напряжения на катушки всех трех реле (A, В и С). В этом случае реле выполняют следующую логическую операцию:
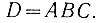
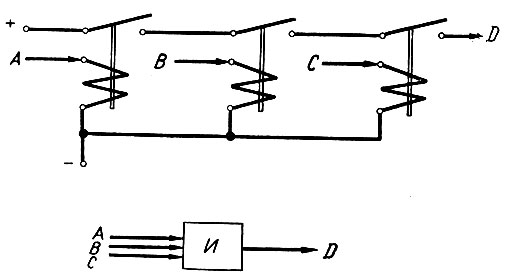
Рис. 2.35. Логический аналог трех последовательно включенных реле
Эта логическая операция может быть выполнена при помощи одного логического элемента "И" (рис. 2.35).
Если три реле включены параллельно (рис. 2.36), то они выполняют логическую операцию D = A + B + C. Поэтому реле могут быть заменены логическим элементом "ИЛИ".
Рис. 2.36. Аналог параллельно включенных реле
Рассмотрим теперь случай, когда последовательно включены три реле с нормально замкнутыми контактами (рис. 2.37). Поскольку в этом случае необходима логическая операция
то она выполняется при помощи двух логических элементов: "ИЛИ" и "НЕ".
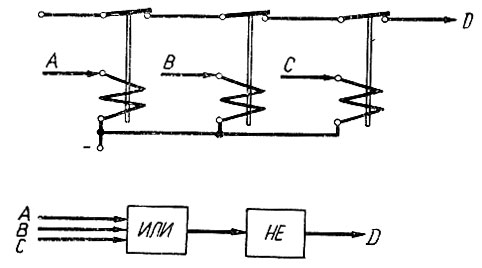
Рис. 2.37. Аналог последовательно включенных реле с нормально замкнутыми контактами
Параллельно включенные реле с нормально замкнутыми контактами (рис. 2.38) выполняют логическую операцию
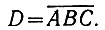
Поэтому они могут быть заменены схемой, состоящей из логических элементов "И" и "НЕ".
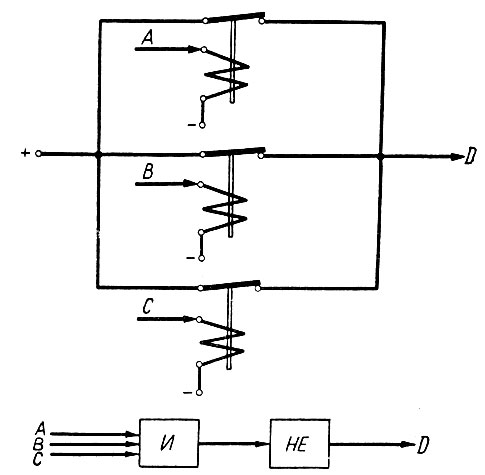
Рис. 2.38. Аналог параллельно включенных реле с нормально замкнутыми контактами
Переключатель (рис. 2.39) выполняет две логические операции:
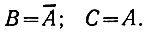
Поэтому они могут быть выполнены при помощи логического элемента "НЕ".
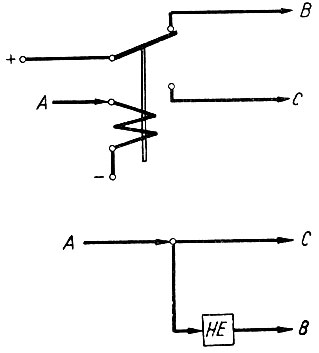
Рис. 2.39. Аналог переключателя
Очень часто в схемах автоматического управления применяются переключатели с самозахватом (рис. 2.40). Характерной особенностью таких переключателей является то, что они при помощи блок-контакта подают напряжение на свою катушку и поэтому не переключаются после снятия сигнала А. Возврат реле осуществляется при помощи кнопки (K). Как следует из схемы переключателя с самозахватом, он выполняет следующие логические операции:

Эти операции (при соответствующем согласовании входов и выходов логических элементов) выполняются логической схемой, показанной на рис. 2.40.
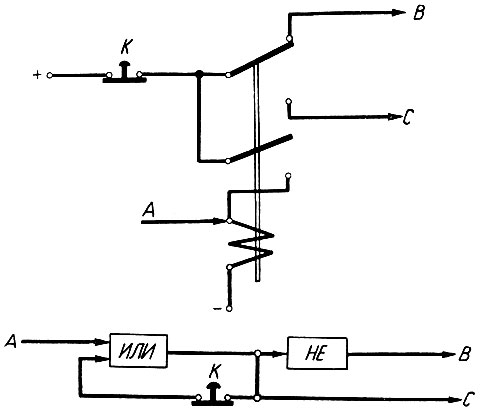
Рис. 2.40. Аналог переключателя с самозахватом
Чем сложнее релейная схема, тем больше логических элементов необходимо для ее замещения. Выбор типа этих элементов и схемы их соединения осуществляется на основе суждений алгебры логики, описывающих релейную схему.
В настоящее время начинается выпуск универсальных логических элементов, наличие которых позволяет создавать любую сложную логическую схему. Такие элементы изготовляются в виде печатных плат, которые очень удобны для монтажа и наладки. Для того чтобы эти элементы были в значительной мере универсальными, они выполняются так, чтобы их можно было использовать в самых различных комбинациях.
Рассмотрим в качестве примера конструкцию универсального логического элемента "И" (рис. 2.41). Элемент состоит (рис. 2.41, а) из трех одинаковых частей. A1÷A6 являются входами элемента, a B1÷B3 - выходами.
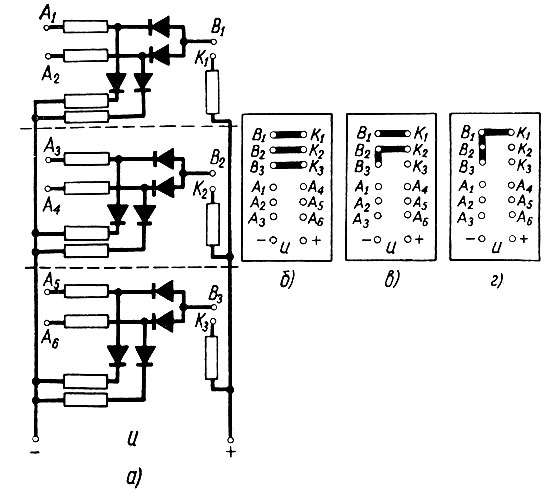
Рис. 2.41. Универсальный логический элемент 'И': а - внутренний печатный монтаж; б, в, г - внешние контакты и схемы их соединения
Если (рис. 2.41, б) контакты В соединить с соответствующими контактами K, то получится три логических элемента, каждый из которых имеет два входа. При соединении контактов по схеме, показанной на рис. 2.41, в, получается два логических элемента, один из которых имеет два входа (А1 и A2), а другой - четыре (A3÷A6). Соединение контактов по схеме 2.41, г позволяет получить один логический элемент с шестью входами.
Используя стандартные логические элементы типа "НЕ", "И", "ИЛИ", можно синтезировать (создавать) кибернетические системы автоматического управления, выполняющие сложные логические суждения.
Естественно, что для согласования логической схемы, собранной из универсальных элементов, с остальной частью системы автоматического управления необходимы преобразующие устройства, согласовывающие эти части системы по напряжениям и токам.
Рассмотрим пример синтеза кибернетической системы автоматического управления, выполненной на логических элементах.
На рис. 2.42 показан бак, из которого непрерывно вытекает вода. Наполнение бака производится по трубопроводу, имеющему вентиль K. Необходимо разработать систему автоматического регулирования уровня воды в баке. При этом требуется, чтобы вентиль К открывался тогда, когда уровень воды опустится ниже точки a, и закрывался при достижении водой точки b.

Рис. 2.42. Система автоматического регулирования уровня воды в баке
В соответствии со сказанным возможны три режима работы вентиля:
а) уровень воды ниже точки а - вентиль необходимо открыть;
б) уровень воды находится между точками a и b - вентиль должен быть либо открыт (при наполнении бака), либо закрыт (при расходовании воды);
в) уровень воды достиг точки b - вентиль надо закрыть.
Установим два датчика, сигнализирующих об уровне воды в баке. Пусть первый датчик дает сигнал (А) в том случае, когда уровень воды в баке находится в точке а и выше. Сигнал на выходе второго датчика (В) пусть появляется тогда, когда вода достигла уровня b.
Тогда в соответствии с тремя режимами работы вентиля логическую схему управления можно представить следующим образом:
1) если A = 0 и B = 0, то надо открыть вентиль (сигнал С);
2) если A = 1, а В = 0, то не нужно изменять положение вентиля;
3) если A = 1 и В = 1, то необходимо закрыть вентиль.
Составим теперь логическую схему, выполняющую эти условия.
Прежде всего, из условия 1 следует, что сигнал открытия вентиля (С) определяется выражением
 (2.34)
(2.34)Кроме условия 1, необходимо также обеспечить выполнение условия 2. Однако уравнение (2.34) не удовлетворяет этому условию. Действительно, в том случае, когда вода находится ниже уровня а, сигналы A = 0 и B = 0. Поэтому (условие 2.34) С = 1, т. е. дается сигнал на открытие вентиля. Но после того, как уровень воды превысит точку а, появится сигнал А = 1 и в соответствии с условием (2.34) С = 0. В этом случае вентиль закроется, хотя он должен быть открыт. Чтобы избежать такого положения, несколько изменим условие (2.34) и запишем:
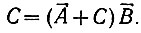 (2.35)
(2.35)В соответствии с данной логической операцией получаются следующие режимы работы системы автоматического регулирования:
а) A = 0, B = 0; тогда С = 1, т. е. в том случае, когда уровень воды находится ниже точки а, дается сигнал (1) на открытие вентиля;
б) A = 1, B = 0; тогда С = 1, т. е. при подъеме уровня воды выше точки а (после открытия вентиля) вентиль остается открытым;
в) А = 1, B = 1; тогда С = 0, т. е. после достижения точки b вентиль закрывается;
г) A = 1, B = 0; тогда С = 0, т. е. при снижении уровня воды (после закрытия вентиля) вентиль остается закрытым.
Следовательно, сложное логическое суждение (2.35) полностью удовлетворяет требованиям, поставленным перед системой автоматического регулирования уровня воды. Это суждение (рис. 2.42) реализуется при помощи четырех логических элементов (двух элементов типа "НЕ", элементов "И" и "ИЛИ"). Выход элемента "И" включается на катушку электромагнита. При появлении сигнала на катушке (С = 1) электромагнит открывает вентиль К, после снятия этого сигнала (С = 0) вентиль закрывается.
Так происходит синтез кибернетических систем на основе логических элементов.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'