
2.2. Когерентный метод непрерывного излучения
Простейшая РЛС, реализующая метод непрерывного излучения, использует непрерывный монохроматический зондирующий сигнал вида
где Um1 - амплитуда сигнала; ω0 - круговая частота сигнала; φ01 - начальная фаза сигнала.
Упрощенная структурная схема такой РЛС показана на рис. 2.2. Передающее устройство состоит из генератора радиочастоты (ГРЧ), приемное устройство - из детектора (Д) и фильтра доплеровских частот (ФДЧ). Обнаружение сигналов выполняется с помощью индикатора (И). На вход ной контур детектора поступают прямой сигнал генератора высокой частоты и сигнал, отраженный от цели. Отраженный сигнал имеет измененную фазу и уменьшенную амплитуду:
где tR = 2R/C - время запаздывания; φотр - изменение фазы при отражении.
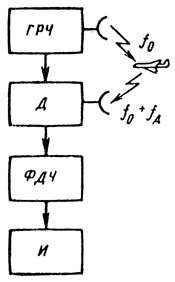
Рис. 2.2
На входном контуре детектора образуется геометрическая сумма сигналов или так называемый сигнал биений (рис. 2.3):
где φ1 и φ2 - мгновенные фазы прямого и отраженного сигналов; Um б - амплитуда сигнала биений, равная
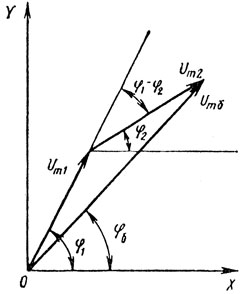
Рис. 2.3
Фаза сигнала биений
| φб = arctg | Um1 sinφ1 + Um2 sinφ2 | . (2.5) |
| Um1 cosφ1 + Um2 cosφ2 |
На нагрузке детектора выделяется огибающая сигнала биений, которая может быть представлена в виде
При М = Um2/Um1 << 1 это выражение упрощается:
Учитывая, что разность фаз прямого и отраженного сигналов
а tR = 2R(t)/c, где R(t) - текущее расстояние до цели, в общем случае равное R(t) = Σ∞i=0R(i)(t0) (t - t0)i/i!, и ограничиваясь равномерным прямолинейным законом движения цели, получаем
Поскольку 2υrω0/c = ωд, то
Таким образом, если цель движется, т. е. υr ≠ 0 и ωд ≠ 0, разность фаз φ1 - φ2 линейно зависит от времени и, следовательно, на векторной диаграмме вектор Um2 вращается относительно вектора Um1 с угловой скоростью
равной круговой частоте Доплера (рис. 2.4).
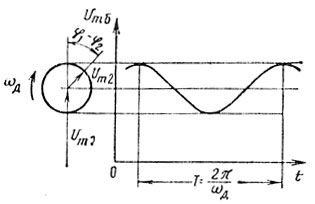
Рис. 2.4
Если цель неподвижна, то υr = 0 и ωд = 0, разность фаз φ1 - φ2 постоянна и векторная диаграмма неизменна во времени (рис. 2.5).
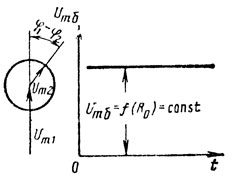
Рис. 2.5
При движении цели частота огибающей равна доплеровской частоте и зависит от радиальной скорости цели. От расстояния до цели R0 будет зависеть начальная фаза огибающей.
В случае неподвижной цели огибающая биений не изменяется во времени, но ее уровень зависит от расстояния до цели, так как

Таким образом, сущность когерентного метода непрерывного излучения сводится к сравнению по фазе отраженного сигнала с опорным когерентным сигналом. Следовательно, для селекции движущихся целей необходима когерентность опорного и отраженного сигналов в течение времени сравнения и обработки или фильтрации. Фильтрация осуществляется фильтром доплеровских частот, который пропускает переменные составляющие продетектированных сигналов, попадающие в полосу возможных частот Доплера. Индикаторное устройство фиксирует значения доплеровских частот, т. е. измеряет υr - радиальную скорость сближения с целью.
Учитывая, что при подаче двух сигналов на вход нелинейного элемента - детектора образуются комбинационные и кратные составляющие частот исходных колебаний, можно процесс селекции или фильтрации сигналов движущихся целей иллюстрировать спектральным составом сигналов на выходе различных элементов РЛС, изображенным на рис. 2.2 (рис. 2.6). Полоса пропускания фильтра доплеровских частот выбирается из соотношения
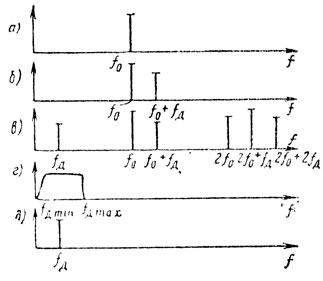
Рис. 2.6
Таким образом, данная РЛС может однозначно измерять радиальную скорость целей, а используя направленные свойства антенной системы, может измерять и направление на цель.
Однако следует учесть, что в режиме обзора пространства на вход приемника будут приходить отраженные сигналы, ограниченные во времени из-за модуляции характеристикой направленности антенн. В этом случае спектр отраженных сигналов расширяется и его ширина может быть оценена как
где τогиб - длительность огибающей колебаний.
Кроме того, нужно учесть возможную флуктуацию этих сигналов и их модуляцию при движении луча антенны, что приводит к расширению спектра отраженных сигналов и делает его сплошным.
При замене фильтра доплеровских частот анализатором спектра радиолокатор будет обладать разрешающей способностью по скорости. Минимальная полоса пропускания фильтра анализатора будет определяться длительностью сигнала при обзоре пространства, а также дополнительным расширением спектра при флуктуации отраженных сигналов и за счет эволюции цели.
При усложнении РЛС удается измерить и дальность цели. Рассмотрим РЛС для измерения дальности движущихся целей с несколькими несущими частотами. Для простоты рассуждения положим, что передатчик излучает две часто ты f1 и f2 (рис. 2.7).
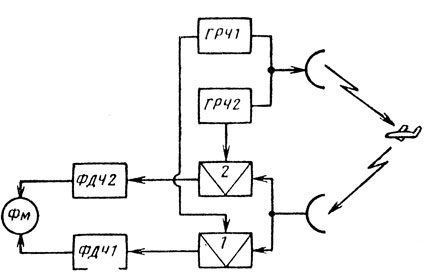
Рис. 2.7
В этом случае при наличии одной цели на вход смесителей поступают сигналы:
где Um1 и Um2 - амплитуды сигналов передатчика; φ1 = ω1t + φ01, φ2 = ω2t + φ02 - фазы сигналов передатчика; Uma и Um4 - амплитуды отраженных сигналов; φ3 = ω1(t - tR) + φ01 - φотр1 и φ4 = ω2(t - tR) + φ02 - φотр2 - Фазы отраженных сигналов; φотр1 и φотр2 - изменение фазы при отражении от цели.
Поскольку обычно ω1 - ω2 << ω1, ω2, то можно считать, что φотр1 ≈ φотр2 = φотр.
При движении цели за счет поправок Доплера после смесителей возникают составляющие, которые отфильтровываются ФДЧ:
Фильтры Ф1 и Ф2 выделяют соответственно сигналы частотами ωд1 и ωд2, после чего эти сигналы поступают на фазометр (ФM), где измеряется их мгновенная разность фаз:
Ф(t) = (φ1 - φ3) - (φ2 - φ4) = (ω1 - ω2) 2R0/c + (ωд1 - ωд2)t.
Это выражение можно преобразовать к виду
Таким образом, фазометр можно отградуировать в единицах расстояния:
При наличии нескольких целей необходимо произвести предварительную селекцию цели по скорости путем настройки узкополосных фильтров Ф1 и Ф2. Это по существу будет последовательным анализом сигнала на выходе смесителей. Применяя параллельный анализатор с 2n фильтрами и фазометрами, можно получить одновременную информацию о дальности n целей, различающихся по скоростям.
РЛС непрерывного излучения используются преимущественно там, где необходимо прежде всего измерять скорость цели на фоне интенсивных помех от местных предметов. Например, такие системы могут применяться при измерении скоростей автотранспорта, их можно использовать и в качестве "часовых".
При технической реализации систем непрерывного излучения нужно учесть просачивание на вход приемника сигнала передающего устройства, превышающего по интенсивности отраженные сигналы. Большой уровень этого сигнала на входе недопустим, вследствие чего необходимо ограничить уровень паразитной модуляции передатчика ниже уровня чувствительности или пороговых сигналов приемника. Наиболее простым способом уменьшения уровня просачивающегося сигнала передатчика является применение отдельных приемной и передающей антенн. Однако это усложняет конструкцию радиолокатора.
Как известно, детекторный приемник имеет низкую чувствительность из-за значительного уровня шумов детектора в области низких частот. Для повышения чувствительности используют супергетеродинный приемник, причем гетеродин (ГЕТ) преобразователя является когерентным и стабильность его колебания должна быть достаточно высокой. Пример построения такой системы показан на рис. 2.8.
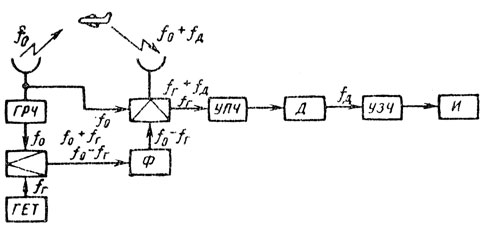
Рис. 2.8
В качестве индикаторных устройств определения скорости и обнаружения сигналов могут использоваться громкоговорители, телефоны, частотомеры и анализаторы спектра. Установлено, что при доплеровских частотах до нескольких тысяч герц наиболее чувствительным индикатором является ухо в сочетании со слуховым аппаратом (телефон), при этом можно получить выигрыш в пороговой мощности сигнала по сравнению с визуальными индикаторами в 15 раз. Если частоты лежат выше пределов чувствительности уха, то сигнал частоты Доплера модулирует дополнительно чистым тоном около 400 Гц, причем когда этого сигнала нет, отсутствует и модулированный сигнал.
Удаление и приближение цели могут определяться при анализе сигнала на некоторой промежуточной частоте - частоте подставки, что может достигаться использованием второго преобразования. Однако при этом для селекции движущихся целей следует подавить на выходе приемника сигнал, соответствующий несущей частоте.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'