
2.3. Когерентный метод непрерывного излучения при использовании модуляции
Измерение дальности движущихся целей возможно, как было показано выше, при использовании нескольких непрерывных сигналов разной частоты или спектральных составляющих модулированного сигнала. При модуляции гармонического сигнала по одному из параметров спектр сигнала состоит из ряда гармоник, смещенных относительно несущего колебания и относительно друг друга на частоту модуляции. Число гармоник в спектре и их амплитуды будут определяться глубиной и законом модуляции. Выбор частоты модуляции зависит от пределов однозначного от счета дальности и от ширины спектра мешающих отражений.
Рассмотрим работу РЛС непрерывного излучения, использующей гармонический закон частотной модуляции (рис. 2.9). На выходе смесителя при любой форме сигналов образуется так называемый преобразованный сигнал, являющийся биениями прямого и отраженного колебаний. Воспользуемся соотношением (2.6), полученным для этого случая.
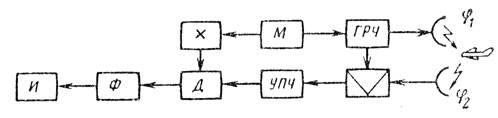
Рис. 2.9
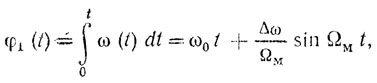
При гармоническом законе модуляции
где ω0 - несущая частота колебания; Δω - девиация частоты; ΩМ - частота модуляции.
Фазы прямого и отраженного сигналов φ1 и φ2 находятся из соотношений:
 (2.13)
(2.13) (2.14)
(2.14)Разность фаз прямого и отраженного сигналов можно представить в виде
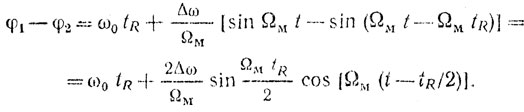 (2.15)
(2.15)Обозначим
 (2.16)
(2.16)Тогда выражение (2.6) запишется в форме

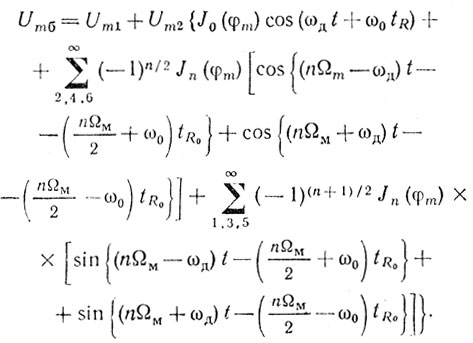
Это выражение можно преобразовать [1]:
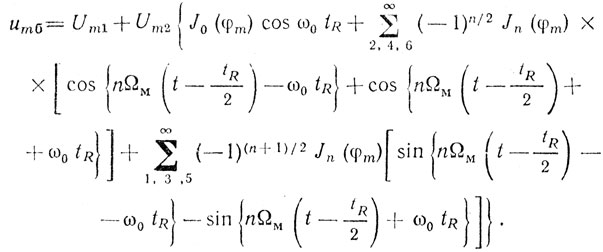 (2.17)
(2.17)Для неподвижной цели tR = const и спектр преобразованного сигнала состоит из гармоник частоты модуляции nΩM, амплитуда которых зависит от дальности цели, так как

При ΩMtR < 0,5 можно считать, что sin(ΩMtR/2) ≈ ΩMtR/2 и поэтому Jn(φm) ≈ Jn(ΔωtR).
Для движущейся цели tR = tR0 + 2υrt/c, поэтому спектр изменяется:
 (2.18)
(2.18)Видно, что спектр преобразованного сигнала движущейся цели состоит из гармоник nΩM ± ωд.
Для селекции движущейся цели из спектра преобразованного сигнала с помощью селективного усилителя промежуточной частоты (УПЧ) достаточно выбрать одну из составляющих nΩM ± ωд. Выбором соответствующего n > 1 можно при данной частоте модуляции без значительного энергетического проигрыша избежать влияния шумов пере датчика и определить скорость движущейся цели. Для этого гармоника nΩM ± ωд сравнивается после усиления в УПЧ, настроенном на частоту nΩM, с гармоникой частоты модуляции nΩM. На выходе элемента сравнения детектора (Д) после фильтрации остается лишь сигнал частоты ωд (рис. 2.10).
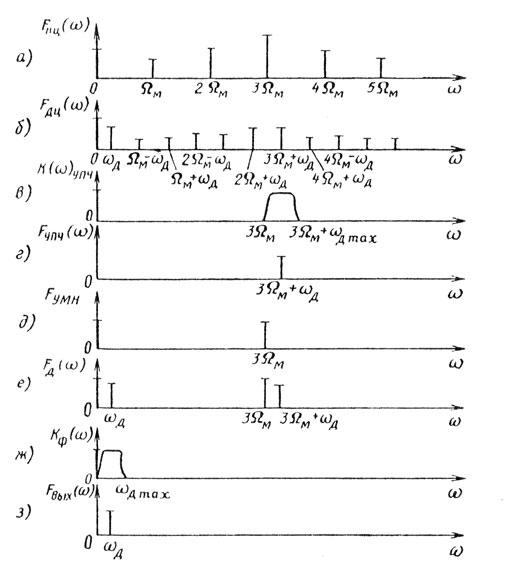
Рис. 2.10
Усложнив систему, можно обеспечить при известной частоте fд измерение дальности цели R. Действительно, пусть

Тогда
 (2.19)
(2.19)При tR0 << 2π/ΩM можно считать, что
Вычислив среднюю частоту биений для двух полупериодов модуляции, получим для первого полупериода
 (2.20)
(2.20)
где  - средняя круговая частота, пропорциональная дальности цели.
- средняя круговая частота, пропорциональная дальности цели.
Производя аналогичные вычисления, для второго полупериода модуляции получаем
 (2.21)
(2.21)Если известно ωд, можно, усредняя частоты биения на отрезках TM/2, вычислять значения ωR, а значит определять R.
Рассмотрим теперь РЛС непрерывного излучения [1.51] с частотной модуляцией по закону меандра (рис. 2.11). В этой РЛС частота передатчика скачками меняется между двумя значениями ω0 и ω0 + ωпч с низкой частотой ΩM. Приемник супергетеродинного типа работает на промежуточной частоте ωпч, и частота гетеродина также изменяется в пределах ω0 и ω0 - ωпч.
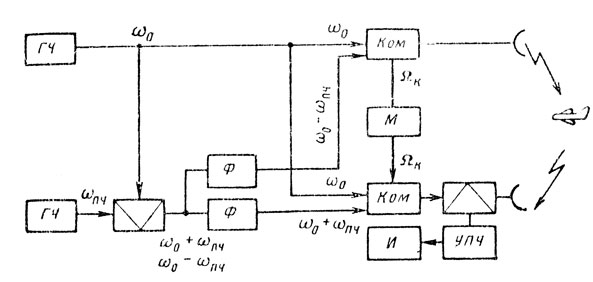
Рис. 2.11
Изменение частот сигналов в данной системе показано на рис. 2.12. Очевидно, импульсы в канале промежуточной частоты будут наиболее широкими, если время запаздывания кратно нечетному числу половин периода модуляции:
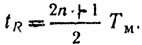
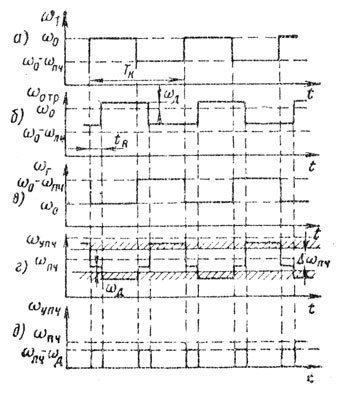
Рис. 2.12
В этом случае в канале УПЧ будет непрерывный сигнал частоты ωпч - ωд. Это время запаздывания называется оптимальным tRопт и соответствует оптимальной дальности до цели Rопт. И, наоборот, при времени запаздывания, кратном периоду модуляции сигнала tR = nТМ, импульсы в канале УПЧ отсутствуют. Таким образом, при селектировании сигнала одной цели, меняя Тм, можно подобрать наивыгоднейший энергетический режим для обнаружения этой цели.
Для разделения сигналов целей, имеющих одинаковую радиальную скорость, но различную дальность, можно использовать линейную модуляцию частоты внутри каждой половины меандра. В этом случае сигналы целей с разных дальностей будут иметь различные разностные частоты ωp = ωд - 2ω0tR/ТM, большие или меньшие по сравнению с сигналом цели, находящейся на оптимальной дальности (рис. 2.13).
Рис. 2.13
Качество фильтрации или, что то же самое, качество селекции сигналов движущихся целей на фоне мешающих отражений от поверхности земли зависит от соотношения частоты модуляции ΩM, доплеровской частоты движущейся цели ωд и диапазона доплеровских частот мешающих отражений ±ωд max.
В нашем случае для повышения качества селекции необходимо вы полнить соотношение
При этом спектральные составляющие сигнала движущейся цели не будут совпадать со спектром помехи.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'