
2.4. Когерентно-импульсные методы СДЦ
При когерентных методах непрерывного излучения в качестве опорного сигнала можно использовать сигнал генератора высокой частоты. В когерентно-импульсном методе такой возможности нет, ибо генератор радиочастоты работает в импульсном режиме. Таким образом, в паузе между зондирующими импульсами необходим дополнительный источник опорного сигнала. Для этого обычно применяется когерентный генератор или гетеродин, работающий в режиме фазовой синхронизации (фазирования) с генератором радиочастоты.
Структурная схема когерентно-импульсной РЛС показана на рис. 2.14 [1,9]. На выходе детектора (Д) образуются биения отраженного и опорного сигналов когерентного гетеродина (КГ). Поэтому соотношения (2.4)-(2.6) и векторные диаграммы (рис. 2.2, 2.3, 2.4) справедливы и в рассматриваемом случае. Однако сигнал U2(t) имеет импульсный характер, поэтому даже при непрерывном опорном сигнале когерентного гетеродина биения возникают лишь во время существования отраженного сигнала (рис. 2.15) (где tR = 2R/c):
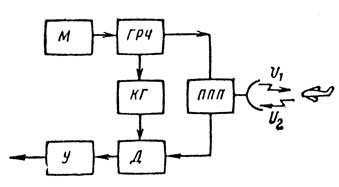
Рис. 2.14
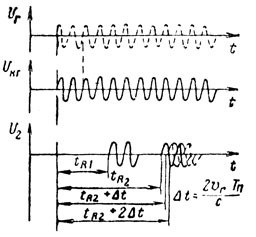
Рис. 2.15
При отсчете времени от начала какого-либо периода повторения биения существуют на отрезках времени
где n = 1, 2, 3, ... - номер периода повторения.
Напряжение биений может быть записано аналогично (2.6):
Поскольку когерентный гетеродин синхронизируется по фазе с генератором высокой частоты, можно считать, что φ1 = φкг и
Между импульсными биениями, т. е. когда
на входе детектора имеется лишь опорный сигнал Uкг, следовательно, на этих интервалах
Используя для сигнала движущихся целей соотношения (2.7) и (2.22), получаем
 (2.26)
(2.26)где t' - время, отсчитываемое в пределах 0 ≤ t' ≤ τ.
Таким образом, биения будут возникать через интервалы времени Tп, в течение которых фаза изменяется на величину Δφ = ωдTп.
Изменение фазы за время импульса будет равно Δφ = ωдτ. В результате при движении цели, когда ωд ≠ 0, амплитуда напряжения на детекторе изменяется согласно (2.26). Учитывая непрерывность первого слагаемого этого выражения и импульсный характер второго, построим график изменения амплитуды сигнала биений на элементе сравнения (рис. 2.16).
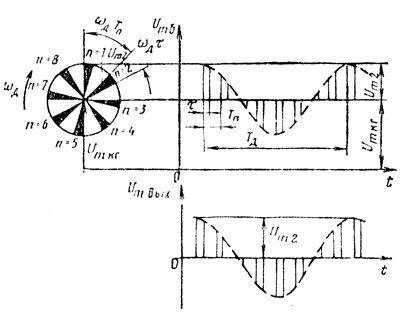
Рис. 2.16
Для неподвижной цели ωд = 0, поэтому
 (2.27)
(2.27)когда (n - 1) Тп + tR0 ≤ t ≤ (n - 1) Tп + tR0 + τ.
В течение времени (n - 1) Тп + tR0 ≤ t ≤ nTп + tR0 амплитуда биений Um б = Um кг.
График изменения амплитуды напряжения сигнала неподвижной цели на элементе сравнения приведен на рис. 2.17. Из рисунков следует, что на выходе детектора после фильтрации постоянной составляющей выходного напряжения сигналы движущихся целей представляют собой знакопеременные модулированные по амплитуде импульсные последовательности (рис. 2.16), а сигналы неподвижных целей - последовательности импульсов с неизменной амплитудой, причем в зависимости от дальности разность фаз φ1 - φ2 меняется от - π до -π, что соответствует изменению амплитуды в пределах ±Um2 (рис. 2.17). При наличии в одной и той же точке пространства (внутри импульсного па кета) движущихся и неподвижной целей результирующий сигнал биений будет состоять из суммы сигналов биений движущейся и неподвижной целей;
 (2.28)
(2.28)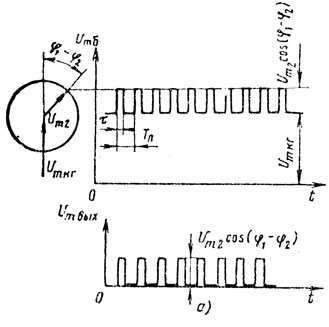
Рис. 2.17
В этом выражении первое слагаемое имеет непрерывный характер, а два последующих - импульсный. Поэтому после фильтрации постоянной составляющей выходного напряжения детектора получаются видеоимпульсы, модулированные по амплитуде так, как показано на рис. 2.18.
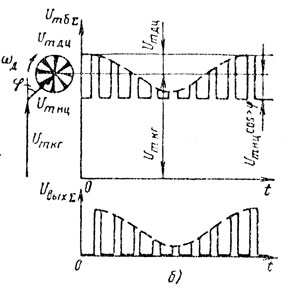
Рис. 2.18
Перенося начало отсчета в соотношениях (2.26) и (2.28) и рассматривая лишь выходное напряжение детектора, которое после фильтрации является чисто импульсным, можно получить следующие зависимости для сигналов движущейся и неподвижной целей:
где Um2 нц = Um нц cos (ω02R0/c - φотр нц) - сигнал неподвижной цели; Um дц - амплитуда сигнала движущейся цели; М = Um дц/Um2 нц - коэффициент модуляции сигнала биений.
Формулы (2.26а) и (2.28а) дают последовательности модулированных по амплитуде видеоимпульсов, спектральный состав которых показан на рис. 2.19.
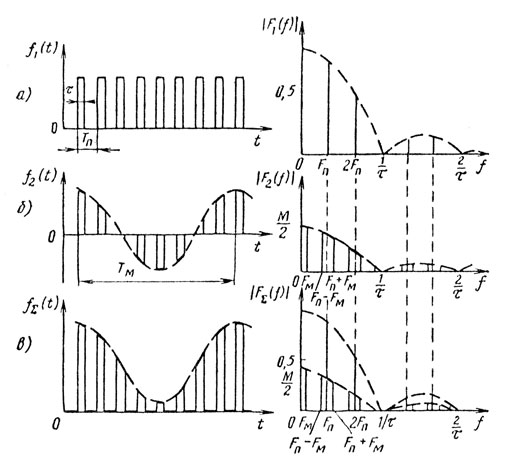
Рис. 2.19
Сравнивая импульсы движущихся и неподвижных целей, можно сделать заключение, что основным отличием временных функций, соответствующих этим последовательностям, будет наличие переменной составляющей в сигнале движущейся цели. В самом деле, для движущейся цели fΣ × (t) = f2(t), для неподвижной fΣ(t) = f1(t) и, наконец, при совпадении в пространстве неподвижной и движущейся целей fΣ(t) = f1(t) + f2(t). Переходя к спектральным представлениям, можно утверждать, что спектр немодулированных видеоимпульсов, соответствующих функции времени f1(t), будет состоять лишь из гармоник частоты повторения (рис. 2.19, а). Спектр знакопеременной последовательности модулированных видеоимпульсов, соответствующих функции времени f2(t), будет состоять из гармоник nFп ± FM (рис. 2.19, б). Наконец, спектр последовательности видеоимпульсов, соответствующих функции времени fΣ(t) = f1(t) + f2(t) будет состоять из гармоник nFп и nFп ± FM (рис. 2.19, в).
Следовательно, для селекции движущихся целей необходимо компенсировать на выходе элемента сравнения импульсные последовательности с постоянной амплитудой или подавлять в спектре сигнала после элемента сравнения все гармоники частоты повторения nFп. Однако при построении устройств селекции движущихся целей в когерентно-импульсных РЛС следует учитывать наличие так называемого стробоскопического эффекта.
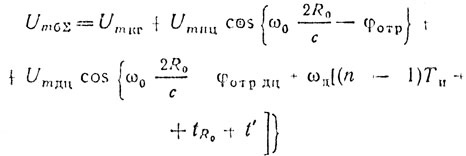
Запишем выражение (2.28а) с учетом фильтрации постоянной составляющей:
Очевидно, Um б Σ будет однозначной функцией n только в пределах однозначности функции косинуса его аргументу. Поэтому можно считать, что для однозначной связи Um б и n необходимо, чтобы
Это соотношение должно выполняться для любого n. Поэтому, полагая n = 2, получаем пределы однозначного соответствия частоты биений импульсной последовательности частоте Доплера
При увеличении fд > Fп/2 за счет периодичности косинуса получаем периодическое повторение указанного соответствия.
На рис. 2.20 показана зависимость частоты биений от частоты Доплера. Видно, что в случае, когда частота Доплера кратна частоте повторения, последовательность импульсов оказывается немодулированной, так как fб = 0. Этот случай соответствует соотношению fд = nFп, где n = 1, 2, 3, ...
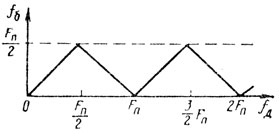
Рис. 2.20
Подставляя в это выражение значение частоты Доплера, получаем
Таким образом, модуляция импульсов движущейся цели отсутствует, а следовательно, сигналы движущейся и неподвижной целей при радиальных скоростях, удовлетворяющих условию (2.30), не различаются. Эти скорости называются "слепыми". Цель, двигающаяся с одной из "слепых" скоростей, за период повторения приближается или удаляется от радиолокатора на расстояние, кратное целому числу половины длины волны несущего колебания радиолокатора. При этом разность фаз прямого и отраженного сигналов за период повторения будет изменяться на величину, кратную 2π. Стробоскопический эффект проявляется и в изменении спектров модулированной последовательности.
Способ построения когерентно-импульсных систем селекции выбирается в зависимости от соотношения параметров импульсной модуляции. Обычно различают когерентно-импульсные РЛС, работающие в режимах малой и высокой скважности. Естественно, граница разделения весьма условна и соответствует значению скважности Q = Tп/τ = 10. При Q < 10 имеем режим малой скважности, а при Q > 10 - большой скважности.
Проанализируем когерентно-импульсный метод селекции малой скважности [1, 51] простейшего радиолокатора (рис. 2.21). Передатчик РЛС состоит из задающего генератора (ЗГ) и усилителя мощности (УМ), а приемник включает детектор, фильтр и усилитель звуковой частоты (УЗЧ). Модулятор (М) попеременно включает и выключает передатчик и приемник, так что передатчик работает импульсами, длительность которых равна половине периода повторения, а скважность равна, например, 2.
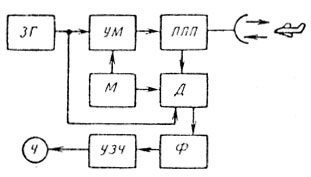
Рис. 2.21
Отраженные импульсы на входе переключателя "прием-передача" (ППП) имеют длительность, равную длительности импульсов передатчика, и запаздывают на время tR0. По скольку приемник периодически коммутируется, импульсы в его тракте оказываются укороченными в различной степени в зависимости от значения времени запаздывания (рис. 2.22).
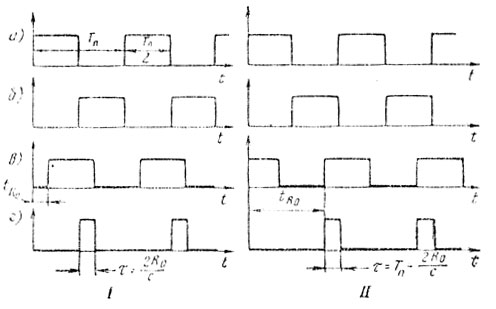
Рис. 2.22
В общем случае при произвольном соотношении времени запаздывания и периода повторения получаем:

при 
Укорочение импульсов приводит к расширению спектра принимаемых сигналов. При произвольном соотношении интервалов времени Тп и tR0 и при изменении дальности цели длительности импульсов в канале приемника плавно и многократно изменяются от 0 до Tп/2. Расстояния, соответствующие нулевым длительностям импульсов в приемном канале, т. е. фактически отсутствию сигнала, называются "слепыми" дальностями (рис. 2.23).
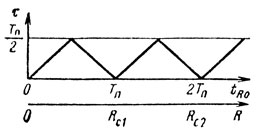
Рис. 2.23
На выходе детектора импульсы сигнала движущейся цели имеют длительность, меньшую Tп/2, и модулированы по амплитуде с частотой Доплера. Следовательно, спектр этих импульсов после детектора становится более широким и в нем появляются частоты nFп ± fд. Спектр неподвижных целей также расширяется, но в нем будут лишь составляющие частоты повторения (рис. 2.24).

Рис. 2.24
С помощью фильтра можно выбрать составляющие спектра, попадающие в полосу возможных частот Доплера. Усилив эти составляющие, можно затем произвести обнаружение доплеровского сигнала и измерение его частоты fд, а значит, и скорости движения цели υr. Как видно, составляющие спектра сигналов от неподвижных целей отфильтровываются, следовательно, эти сигналы подавляются.
Такая система построения когерентно-импульсной РЛС, работающей в режиме малой скважности, не всегда позволяет измерить дальность движущихся целей. Выбор метода измерения дальности в радиолокаторе этого типа определяется соотношением периода повторения Тп и максимальным временем запаздывания сигнала tRmax. В свою очередь, выбор периода повторения зависит от соотношения ширины спектра помехи от неподвижных целей (особенно от земли) и ширины диапазона возможных доплеровских частот движущихся целей [1, 10].
При малой ширине спектра помех и небольшом диапазоне возможных частот Доплера удается выбрать малую частоту повторения, удовлетворяющую условию однозначного измерения дальности. При этом основным условием селекции целей по частоте Доплера является отсутствие перекрытия спектров цели и помехи (рис. 2.25).
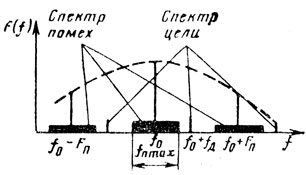
Рис. 2.25
Если fдп max и fд max малы и частота Fп удовлетворяет условиям однозначного отсчета дальности, т. е. невелика, то это соответствует когерентно-импульсной РЛС, работающей в режиме малой скважности с низкой частотой повторения. Обычно fдп max и fд max невелики в случае наземных и морских РЛС, облучающих медленно перемещающиеся цели.
При больших fдп max и fд max, что характерно для радио локаторов, устанавливаемых на летательных аппаратах, частота повторения не удовлетворяет условию однозначного отсчета дальности. В этом случае когерентно-импульсные РЛС работают в режиме малой скважности с высокой частотой повторения.
Для улучшения разрешающей способности РЛС (рис. 2.21) по дальности следует уменьшать дли тельность импульса. В режиме малой скважности энергия сигнала сосредоточена в небольшом количестве гармоник. В этом случае для подавления пассивных помех нужны режекторные гребенчатые фильтры (РГФ) с ограниченным числом полос задерживания. Их техническая реализация не вызывает затруднений.
Основным достоинством когерентно-импульсных РЛС с РГФ является хорошее качество подавления мешающих сигналов, которое зависит от крутизны спадов амплитудно-частотной характеристики фильтра и может достигать 70-130 дБ. Считая среднее значение подавления 90-95 дБ, можно сделать заключение о том, что уровень оставшихся помех соизмерим с уровнем шумов и во многих случаях это является решающим, несмотря на неоптимальность обработки сигналов при выборе структуры РЛС.
Рассмотрим теперь построение когерентно-импульсных РЛС, работающих в режиме малой скважности с высокой частотой повторения.
В этом случае частота повторения выбирается высокой и может достигать нескольких сотен килогерц. При этом условие однозначного отсчета дальности не удовлетворяется. Более того, на интервале 0-tRmax укладывается большое число периодов повторения, так как tRmax/Tп >> 1 и, следовательно, при приближении или удалении точечной Дели имеет место эффект "слепых" дальностей (на расстояниях, кратных периоду повторения, из-за коммутации приемника отраженный сигнал пропадает).
РЛС с высокой частотой повторения прежде всего пред назначены для селекции сигнала по скорости. Структурная схема такой РЛС показана на рис. 2.26. Выход приемника с помощью коммутатора стробируется селекторными импульсами, образуя М каналов дальности. В каждом канале дальности имеется система из N параллельно включенных фильтров Ф1, ..., ФN, с помощью которой осуществляется частотный анализ сигнала. Число фильтров зависит от полосы пропускания каждого фильтра и диапазона анализируемых доплеровских частот. Полоса пропускания фильтра определяется шириной выделяемого спектра цели, т. е. зависит от времени наблюдения и ширины спектра флуктуации сигнала цели [1, 8].
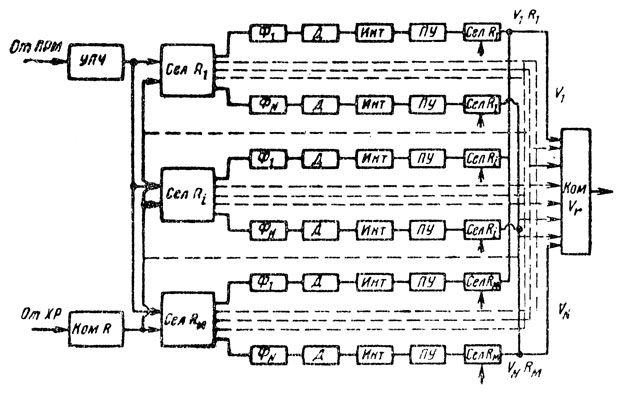
Рис. 2.26
При слишком большом числе каналов анализатора отказываются от построения оптимальных фильтров Ф1, ..., ФN, увеличивают их полосу пропускания и тем самым снижают качество работы каналов. Для некоторой компенсации потерь из-за неоптимальности фильтров используют последетекторное интегрирование. Для этого в каналы анализатора введены детекторы (Д) и интеграторы (ИНТ). При превышении порогового уровня на пороговых устройствах (ПУ) сигнал соответствующего канала с помощью коммутатора (КОМ) через селекторы дальности (Сел R), коммутируемые селекторными импульсами, подается на индикатор "азимут-скорость", где и осуществляется наблюдение сигнала цели.
Измерение дальности может осуществляться либо при нескольких частотах повторения, либо при непрерывном изменении частоты повторения по какому-нибудь периодическому закону [8-10]. Однозначное измерение дальности воз можно, если разница в частотах повторения или частота вобуляции не будут превышать частоты повторения, выбираемой из условия однозначного измерения дальности.
Кроме того, для измерения дальности может использоваться дополнительная низкочастотная модуляция несущего колебания передатчика по амплитуде, частоте, фазе или ширине импульсов и их положению. Хотя модуляция периода повторения импульсов или их положения сглаживает эффект слепых дальностей, в общем случае любая модуляция приводит к дополнительному расширению спектра пассивных помех, а также к появлению гармоник модуляции в спектре сигналов. Это обстоятельство затрудняет селекцию сигналов движущихся целей и ухудшает качество селекции по скорости.
При измерении с помощью нескольких частот повторения индикация истинного положения отраженного импульса производится по совпадению отраженных импульсов на всех частотах повторения. Для соотношения частот повторения 1:3:4 процесс измерения дальности иллюстрируется рис. 2.27. На рис. 2.27, б и в показаны зондирующие и отраженные импульсы на двух сменных частотах повторения. После сравнения импульсных последовательностей совпавшие отраженные импульсы дают информацию об истинной дальности (рис. 2.27, а и г).
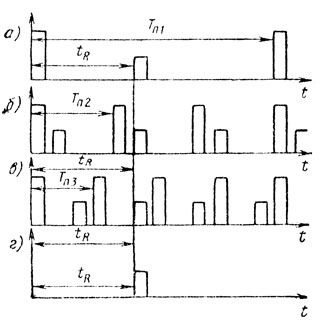
Рис. 2.27
Особенностью таких РЛС являются и жесткие допуски на стабильность передатчика по частоте и фазе. Обычно применяются многокаскадные передатчики с кварцевой стабилизацией задающего генератора. Для питания используется хорошо отфильтрованное напряжение, а узлы аппаратуры тщательно амортизируются [1, 51].
Рассмотрим теперь когерентно-импульсную РЛС, работающую в режиме высокой скважности, основным преимуществом которой является высокая разрешающая способность по дальности.
Различают истинно когерентные и псевдокогерентные РЛС, которые часто называют также когерентными РЛС селекции движущихся целей. Различие этих систем заключается в способе построения передающего устройства и способе получения опорного когерентного напряжения, что при водит к различному интервалу когерентности сигналов РЛС.
На рис. 2.28 приведен пример схемы истинно когерентной РЛС высокой скважности. Передатчик построен по многокаскадному принципу. Стабильные колебания задающего генератора промежуточной частоты (ГПЧ) умножаются по частоте и усиливаются в усилителе мощности (УМ). Одновременно в этом же каскаде происходит импульсная модуляция сигнала с высокой скважностью и частотой повторения, зависящей от модулятора (М).
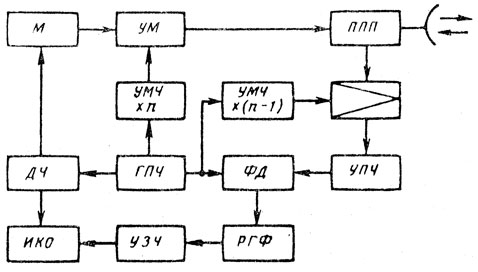
Рис. 2.28
С помощью второго умножителя частоты (УМЧ), на который подаются колебания задающего генератора промежуточной частоты, формируется гетеродинный сигнал, используемый для преобразования частоты принимаемых сигналов в смесителе приемника. Усиленные в УПЧ сигналы сравниваются с опорным колебанием генератора промежуточной частоты на фазовом детекторе (ФД). Сигнал биений в виде модулированной или немодулированной последовательности видеоимпульса (рис. 2.20) подается на режекторный гребенчатый фильтр (РГФ), который селектирует сигналы движущихся целей и подавляет все составляющие частоты повторения. После усиления сигналы движущихся целей подаются на индикатор кругового обзора (ИКО), где и происходит их обнаружение и определение координат R, α. На рис. 2.29 показаны спектры сигналов на входе и выходе РГФ, а также амплитудно-частотная характеристика этого фильтра.
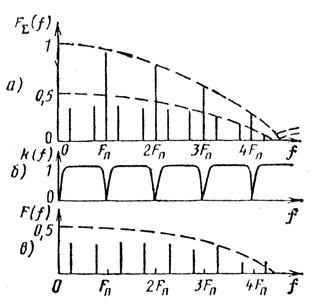
Рис. 2.29
Скорость движения цели υr может измеряться, только если выполняется неравенство fд ≤ Fп/2, учитывающее наличие стробоскопического эффекта в РЛС. Система измерения скорости представляет собой набор доплеровских фильтров, перекрывающих диапазон частот, не превышающий Fп/2. Фильтры с помощью селектора дальности включаются на выход приемника на короткий отрезок времени, соответствующий участку дальности или элементу разрешения по дальности. Такая система обработки сигналов показана на рис. 2.30 [8, 9]. Фильтр защиты от помех (ФП) выделяет из спектра сигналов составляющие, лежащие в диапазоне частот
где fп max - максимальная частота спектра помехи.
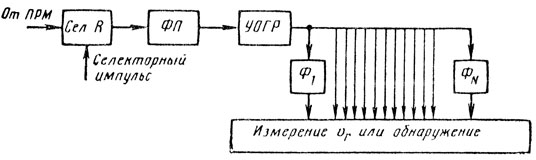
Рис. 2.30
Усилитель-ограничитель (УО) выравнивает амплитуды сигналов. Фильтры доплеровских частот Ф1, ..., ФN перекрывают диапазон частот fп max - Fп/2 и имеют полосы пропускания, соответствующие требуемой разрешающей способности по скорости или определяемые шириной частотных составляющих спектра сигнала.
Такая обработка не является оптимальной, так как используется энергия лишь одной гармоники спектра сигнала. Для устранения этого недостатка необходимо существенно усложнить систему фильтрации. Число фильтров нужно увеличить примерно в Tп/τ раз, что технически трудно реализовать.
Для частичной компенсации энергетического проигрыша иногда используют трансформацию спектра сигнала с помощью нелинейного элемента или демодулятора. Часто этим нелинейным элементом является детектор огибающей (ДО), детектор со сбросом или пиковый детектор (ПД). Такая си стема обработки сигнала показана на рис. 2.31 [1]. Характеристики узкополосных фильтров те же, что и в предыдущей системе. Длительность импульсов после пикового детектора увеличивается с τ до Тп. За счет этого спектр импульсной последовательности становится более узким и энергия низко частотных гармоник увеличивается. Многокаскадное по строение передатчиков в истинно когерентных РЛС позволяет получать высокую стабильность несущего колебания. Таким образом, интервал когерентности может быть увеличен, во всяком случае, до величины, значительно превосходящей период повторения импульсов. Это означает, что истинно когерентные РЛС излучают когерентные импульсы. При этом интервал когерентности определяется стабильностью частоты несущего колебания.
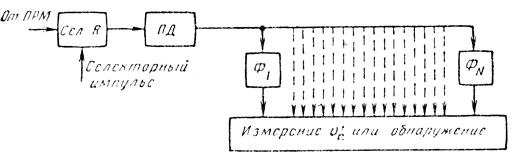
Рис. 2.31
На рис. 2.32 приведен пример схемы псевдокогерентности РЛС, работающей в режиме высокой скважности. При таком построении используются однокаскадные передатчики. Генератор радиочастоты (ГРЧ) работает в режиме самовозбуждения при модуляции импульсами высокой скважности .
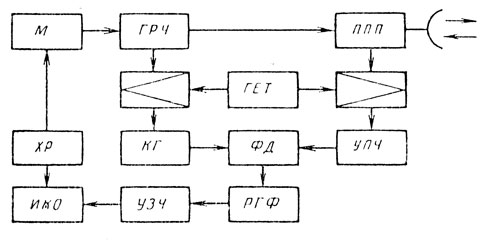
Рис. 2.32
Опорный когерентный сигнал формируется КГ, который синхронизируется по фазе импульсами генератора радиочастоты, предварительно преобразованными на промежуточную частоту, так как когерентный гетеродин работает на промежуточной частоте. Принятые сигналы сравниваются с опорным также на промежуточной частоте в фазовом детекторе (ФД). Подавление сигналов пассивных помех осуществляется РГФ. Основным отличием видеоимпульсов движущейся цели является модуляция по амплитуде, поэтому для их селекции могут использоваться методы подавления немодулированных видеоимпульсов. Такое подавление может выполняться системой череспериодного вычитания (рис. 2.33, а), имеющей режекторную гребенчатую характеристику. Каждый видеоимпульс задерживается на Тп с помощью устройства задержки (УЗ) и вычитается из предыдущего в устройстве вычитания (УВ).
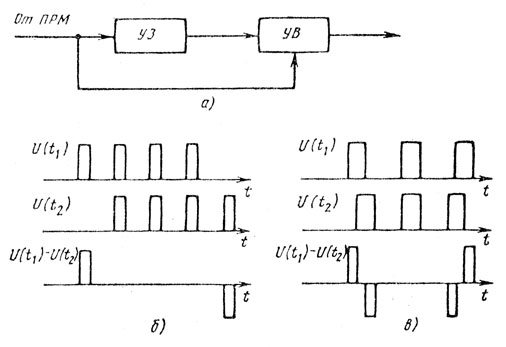
Рис. 2.33
Импульсы неподвижных целей не меняются по амплитуде от периода к периоду, поэтому в УВ они полностью компенсируются (рис. 2.33, б). Импульсы движущихся целей модулированы по амплитуде, поэтому после вычитания остаются импульсы, равные разности амплитуд двух соседних импульсов, так называемый некомпенсированный остаток.
Особенностью псевдокогерентных РЛС является малый интервал когерентности сигнала, равный одному периоду повторения. Это объясняется тем, что колебания генератора Радиочастоты имеют случайную начальную фазу от импульса к импульсу или от периода к периоду повторения. Следовательно, спектр таких импульсов является сплошным. Поэтому фазовая синхронизация осуществляется импульсом ГРЧ в начале каждого периода повторения и когерентность колебаний ГРЧ и опорного сигнала КГ сохраняется лишь на этот период повторения. То же повторяется и в каждом следующем периоде. В двух соседних периодах или в двух любых периодах повторения когерентность колебаний отсутствует, поэтому РЛС и называется псевдокогерентной. Получение опорного напряжения с помощью фазовой синхронизации, или фазирования, требует высокой стабильности частоты колебаний ГРЧ, ГЕТ и КГ.
При большом Тп, выбираемом из условия однозначности, согласно (2.30) значение первой "слепой" скорости υr1 может быть небольшим, а количество "слепых" скоростей nmax в пределах возможного диапазона рациональных скоростей υr max возрастает. Кроме того, большой период повторения дает возможность однозначного измерения радиальной скорости лишь в пределах выполнения неравенств:
 (2.32)
(2.32)Увеличить λ для перекрытия всего заданного диапазона радиальных скоростей не позволяет требование к ширине диаграммы направленности антенны РЛС.
Одним из выходов, позволяющих уменьшить число "слепых" скоростей и обеспечить однозначное измерение радиальной скорости в пределах всего заданного диапазона, является двухчастотный метод [14]. На рис. 2.34 приведена структурная схема двухчастотной РЛС. Передатчик состоящий из двух ГРЧ, излучает одновременно два радиоимпульса на несущих частотах ω1 и ω2. С помощью смесителя 1 выделяется фазирующий радиоимпульс на разностной частоте ω2 - ω1 и осуществляется фазирование КГ. Двухканальный приемник с помощью ГЕТ, работающего на частоте ωпч + ω1, преобразует принятые и усиленные в УРЧ радиоимпульсы на частоте ωпч в одном канале и ωпч + ω2 - ω1 - в другом. После усиления в УПЧ и преобразования в смесителе 2 на разностную частоту ω2 - ω1 отраженные импульсы сравниваются по фазе на ФД с опорным сигналом когерентного гетеродина. При наличии движущейся цели (так же, как и в двухчастотном методе непрерывного излучения) доплеровская поправка на разностной частоте
 (2.33)
(2.33)где fр = f2 - f1 - разность несущих частот; λр = c/fp - длина волны колебаний на разностной частоте; fдр - доплеровская поправка колебаний разностной частоты fр.
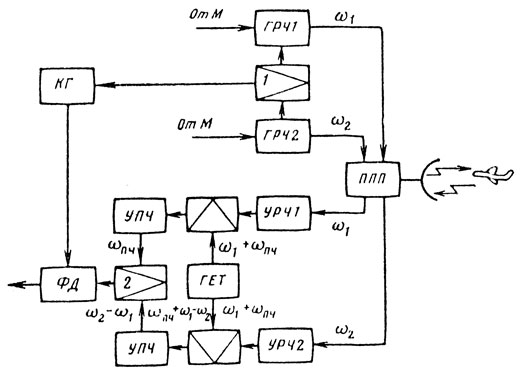
Рис. 2.34
Поскольку fр << f1, f2, а λр >> λ2, λ1, первая "слепая" скорость на разностной частоте возрастает, а число "слепых" скоростей в заданном диапазоне падает:
 (2.34)
(2.34)Кроме того, при большом Тп на λр появляется возможность решить проблему однозначного измерения скорости, так как
 (2.35)
(2.35)Для повышения качества подавления пассивных помех часто применяется метод междуобзорного или кадрового вычитания. В системах, реализующих этот метод, применяют принцип сравнения положения сигналов целей через определенный промежуток времени. Интервал времени, через который производится сравнение положения целей, зависит от скорости движения цели. В этом случае также используется эффект Доплера, но не на частоте заполнения, а на частоте смены кадров изображения. Для уверенной селекции движущихся целей сигналы должны за интервал времени сравнения Тср переместиться на величину, сравнимую с длительностью импульса. Таким образом, должно выполняться соотношение
Следовательно, уверенная индикация возможна для известных τ и υr при интервале сравнения
Структурная схема устройства, реализующего метод кадрового вычитания, и графики, поясняющие его работу, аналогичны схемам, представленным на рис. 2.33, а и в.
Основной трудностью при технической реализации такой системы селекции является осуществление запоминающего или задерживающего устройства. При скоростях реальных целей интервал сравнения должен составлять несколько секунд или даже несколько десятков секунд при приемлемой разрешающей способности по дальности, определяемой длительностью импульса. Поэтому сравнение положения сигналов приходится производить через интервал времени, равный периоду вращения или качания луча антенны РЛС. Скорость цели при выбранных τ и Тср = TΩ можно определить как
 (2.37)
(2.37)где τост - длительность импульсов некомпенсированного остатка; TΩ - период вращения антенны.
Пределы измеряемой скорости
Достоинством кадрового вычитания является возможность селекции целей с нулевой радиальной скоростью при наличии тангенциальной составляющей скорости. Обычно системы кадрового вычитания используются совместно с системами череспериодного вычитания.
Сложность технической реализации когерентно-импульсных РЛС явилась причиной разработки и использования более простых методов селекции сигналов движущихся целей. Рассмотрим некоторые из них.
Наиболее часто используется так называемый вторичный доплеровский эффект, заключающийся в том, что различные части объекта имеют различные радиальные скорости относительно радиолокатора и, следовательно, различные доплеровские частоты. Таким образом, сигнал движущейся цели имеет спектр частот; поскольку цель должна рассматриваться как сложная точечная цель, меняющая непрерывно ориентацию относительно РЛС. При детектировании в приемном канале образуются комбинационные составляющие, так называемые вторичные частоты Доплера. За счет этих частот, обычно лежащих в диапазоне низких звуковых частот, сигналы цели изменяются - флуктуируют или мерцают с небольшой частотой. На индикаторе эти мерцания заметны на глаз, а по их интенсивности легко отличить движущуюся цель от неподвижной.
Кроме того, эффект мерцания может вызываться изрезанностью диаграммы рассеяния цели, которая в случае движения цели также непрерывно меняет ориентировку относительно радиолокатора, чем и вызывает дополнительную флуктуацию сигнала. Индикация движущихся целей по мерцанию является простейшей селекцией и при всем своем несовершенстве в ряде случаев может эффективно осуществляться.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'