
2.5. Особенности сопровождения движущихся целей
Основным фактором, влияющим на сопровождение движущихся целей на фоне пассивных помех, является необходимость выделять сигнал ошибки из смеси сигнала, шума и коррелированной пассивной помехи [1]. Использование в тракте обработки устройств подавления помехи облегчает решение задачи сопровождения, однако при этом остается ряд специфических проблем. Принципиально строгое решение задачи обеления коррелированной пассивной помехи обеспечивает после обеляющего фильтра наличие смеси сигнала с белым шумом. Однако невозможность на практике реализовать оптимальную систему обеления пассивной помехи приводит к тому, что на вы ходе квазиоптимального обеляющего фильтра имеются остатки пассивной помехи из-за ее "недообеления" или "переобеления". Остатки пассивной помехи ввиду большого динамического диапазона помехи на входе системы ухудшают отношение сигнала к шуму, что приводит к увеличению флуктуационных ошибок сопровождения, и, кроме того, из-за протяженного характера пассивной помехи могут вызывать ошибки смещения. Поэтому разработка помехоустойчивых систем автосопровождения движущихся целей имеет важное значение в радиолокации.
Автоматическое сопровождение целей по дальности и угловым координатам (направлению) осуществляется совмещением нулевой точки характеристик временного или углового дискриминатора с серединой отраженного импульса на выходе приемника или с направлением на цель. При этом обычно существует определенная логика поиска и захвата выбранной цели. Чаще всего она сводится к захвату цели по скорости, сопровождению ее по скорости, захвату цели по дальности, ее автосопровождению по дальности и затем уже к захвату и автосопровождению этой цели по направлению. Такой порядок захвата и сопровождения цели (или ряда целей) предполагает фильтрацию сигнала, стробирование (селектирование) приемника селектирующими по дальности импульсами и образование канала (каналов) сопровождения целей [1]. При этом для радикального решения задачи защиты от пассивных помех селектирование приемного канала необходимо производить после устройства подавления пассивных помех (так называемая классическая схема [2]), как показано на рис. 2.35. Однако системы подавления, такие же как в канале обнаружения, нерациональны для использования в каналах сопровождения из-за своей сложности. Поэтому в каналах автосопровождения по дальности применяются более простые устройства подавления в виде доплеровских фильтров в плечах временного дискриминатора (рис. 2.36). На выходах интеграторов в схемах рис. 2.35 и 2.36 напряжение пропорционально площади перекрытия во времени отраженного и селекторного импульсов (СИ) и изменяется по амплитуде в соответствии с частотой Доплера при движении цели. Полосовые доплеровские фильтры выделяют сигналы только движущейся и отселектированной по дальности цели. После детектирования интенсивность (уровень) этих сигналов сравнивается вычитающим устройством и таким путем формируется сигнал ошибки (СО).
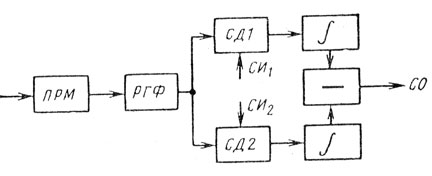
Рис. 2.35
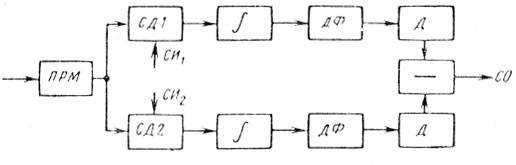
Рис. 2.36
Как известно, существует две основные группы РЛС сопровождения по направлению: РЛС с коническим сканированием и моноимпульсные (многоканальные) РЛС.
На рис. 2.37 приведена схема одноканальной РЛС с коническим сканированием и с защитой канала углового автосопровождения от пассивных помех, а на рис. 2.38 - спектральный состав сигналов и помех в различных точках такого устройства автосопровождения.
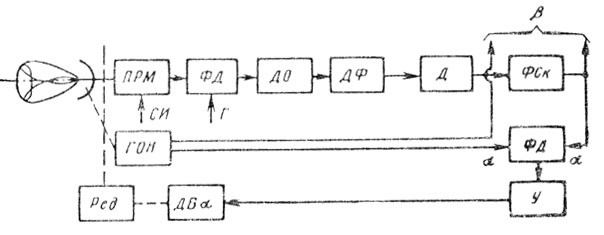
Рис. 2.37
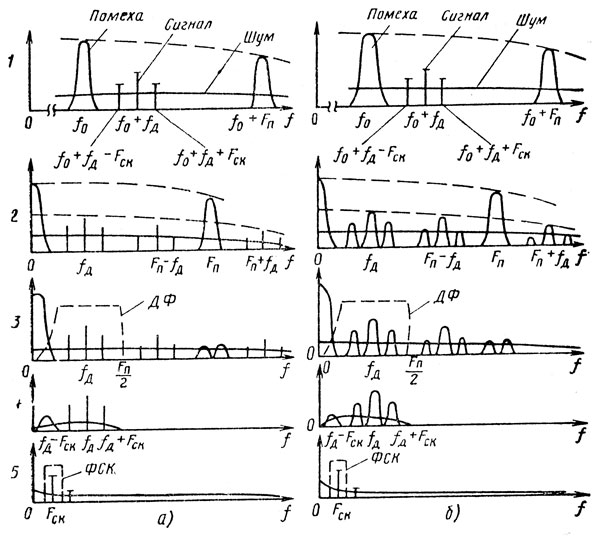
Рис. 2.38
Система автосопровождения по направлению использует сигнал, отселектированный по дальности с помощью стробирования УПЧ селекторным импульсом. На фазовый детектор могут подаваться сигналы когерентного гетеродина в случае режима внутренней когерентности или сигнала помехи с линии задержки либо помехового гетеродина [2] в режиме внешней когерентности. Детектор огибающей растягивает импульсы на период повторения, а доплеровский фильтр отфильтровывает спектральную составляющую'сигнала движущихся целей на частоте fд в диапазоне частот fд min - Fп/2. После детектирования в детекторе и фильтрации фильтром сканирования (ФСк) выделяется сигнал ошибки на частоте сканирования Fск. Рассматриваются два варианта системы с внешней (рис. 2.38, б) и внутренней (рис. 2.38, а) когерентностью.
Когерентно-импульсная РЛС, построенная по схеме с внутренней когерентностью, имеет преимущество перед РЛС, построенной по схеме с внешней когерентностью, заключающееся в том, что в первом случае осуществляется линейное преобразование спектров сигналов при сравнении в фазовом детекторе, исключающее расширение спектральных составляющих сигналов движущихся целей. На против, если в качестве опорных используются сигналы неподвижных целей или помехового гетеродина, в схеме с внешней когерентностью при сравнении происходит взаимная модуляция (образование комбинационных составляющих), приводящая к изменениям спектра сигналов движущихся целей.
Появление дискретных составляющих на частоте сканирования после детектора в системе с внешней когерентностью объясняется существованием когерентной жесткой связи спектральных составляющих частоты сканирования для сигналов движущихся целей, играющих основную роль в преобразовании спектров двухтактным детектором. Следует отметить, что если в спектре сигнала от неподвижных целей есть составляющие частоты сканирования (крупная структура), то они исчезают после детектора в системе с внутренней когерентностью, что объясняется линейным преобразованием спектров в фазовом детекторе и существованием когерентной связи этих составляющих при преобразовании сигналов детектором. Это важное преимущество систем с внутренней когерентностью.
Таким образом, на выходе фильтра сканирования образуется сигнал ошибки на частоте сканирования Fск и сигнал помехи, пропорциональный интенсивности спектральных составляющих сигнала от неподвижных целей в полосе пропускания системы автосопровождения. Поскольку последняя выбирается исходя из необходимых динамических свойств системы, она не может быть сделана малой. Поэтому при наличии отражений от неподвижных целей, особенно Протяженных, ошибки системы сопровождения резко возрастают даже при наличии блока подавления сигналов от неподвижных целей.
Точность РЛС с защитой от пассивных помех при автосопровождении точечной цели подробно рассмотрена в работе [2] и иллюстрируется графиками относительных нормированных ошибок автосопровождения σθн. В зависимости от режима работы РЛС, режима детектирования и отношения мощности пассивной помехи к мощности собственного шума qп (рис. 2.39). На рисунке обозначено: 1 - идеальная система; 2(1) - РЛС с внутренней когерентностью; 3(2) - РЛС с внешней когерентностью с линейным Д; 4(3) - РЛС с внешней когерентностью с помеховым гетеродином; 5(4) - РЛС с внешней когерентностью с квадратичным детектором (цифра в скобках относится к рис. 2.42).
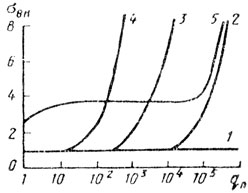
Рис. 2.39
На рис. 2.40 и 2.41 приведены структурные схемы моноимпульсных амплитудной и суммарно-разностной РЛС сопровождения целей по направлению [2].
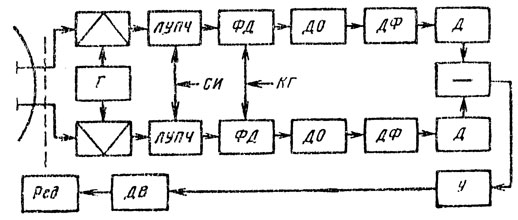
Рис. 2.40
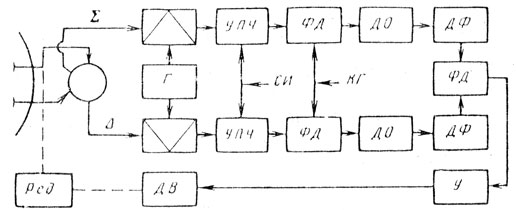
Рис. 2.41
В простой амплитудной системе (рис. 2.40) в каналах углового дискриминатора осуществляются фазовое детектирование селектированных по дальности в логарифмических УПЧ (ЛУПЧ) сигналов цели с помехой, растяжение импульсов на весь период повторения с помощью детектора огибающей, фильтрация доплеровским фильтром сигнала движущейся цели и детектирование сигналов в каждом канале. Путем вычитания сигналов на выходе каналов формируется сигнал ошибки, управляющий антенной. В качестве опорного сигнала в фазовых детекторах в режиме с внутренней когерентностью используется сигнал когерентного гетеродина, в режиме с внешней когерентностью с совмещенной помехой - задержанный сигнал помехи и, наконец, при несовмещенной помехе - сигнал помехового гетеродина.
В суммарно-разностной системе (рис. 2.41) обработка в каналах углового дискриминатора происходит точно так же, как ив системе рис. 2.40. Различие заключается в том, что сигнал ошибки формируется с помощью фазового детектора, реагирующего на сторону отклонения цели от равносигнального направления, так как разность и сумма сигналов облучателей антенн, формируемые с помощью гибридного кольца, в зависимости от стороны отклонения цели от равносигнального направления будут либо в фазе, либо в противофазе.
Анализ ошибок автосопровождения в таких системах показывает, что при наличии пассивных помех, неравномерно распределенных в пространстве, появляются систематические (ошибки смещения) и флуктуационные ошибки. В [2] утверждается, что характер ошибок в различных моноимпульсных или многоканальных РЛС сопровождения при любых режимах работы с внешней и внутренней когерентностью такой же, как и при автоматическом слежении по направлению (АСН) с коническим сканированием. При этом ошибка смещения зависит от неравенства мощностей остатков пассивной помехи в каналах углового дискриминатора и крутизны дискриминационной характеристики. Для различных случаев обработки сигналов характер изменения систематической ошибки θс, отнесенной к ширине луча антенны φл в зависимости от ширины спектра помех, отнесенной к нижней частоте среза ДФ ΔF/F1, показан на рис. 2.42.
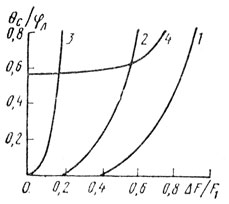
Рис. 2.42

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'