
4.3. Коэффициент подпомеховой видимости
Коэффициент подпомеховой видимости (Кпв) есть отношение, которое показывает, насколько средняя мощность сигнала от цели Рс вх может быть слабее мощности пассив ной помехи Рп вх. При этом полезный сигнал обнаруживается с заданными вероятностями правильного обнаружения (D) и ложной тревоги (F). Плотность распределения радиальных скоростей обнаруживаемых целей равновероятна. Важно то, что Кпв определяется перед режекторным фильтром. Вероятности правильного обнаружения и ложной тревоги обычно выбирают равными D = 0,5 или D = 0,8, F = 10-6 [48, 49, 61].
Коэффициенты Ку и Кпв являются наиболее распространенными показателями эффективности устройств СДЦ. При этом если Ку характеризует эффективность только устройства режекции, то Кпв характеризует способность РЛС обнаруживать сигнал на фоне интенсивных пассивных помехи, следовательно, этот параметр зависит не только от характеристик режекторного фильтра, но и от используемого алгоритма обнаружения. Другими словами, Кпв характеризует эффективность тракта от режекторного фильтра до порогового устройства, который включает также детектор и накопитель.
Определим связь между Ку и Кпв. В соответствии с определением коэффициента подпомеховой видимости можно записать
 (4.40)
(4.40)или в децибелах
Отношение (Р¯с/Рп)вых есть пороговое отношение qпор и представляет собой минимальное превышение сигнала над помехой, необходимое для обнаружения цели. Оно за висит от модели сигнала и помех, критерия обнаружения, заданных вероятностей правильного обнаружения и лож ной тревоги, времени обнаружения (числа импульсов в пачке). В ранних работах [35] отношение (Рс/Рп)вых принималось равным 9. При определении величины порогового сигнала необходимо учитывать потери в тракте СДЦ:
где qпор D, F - минимальное превышение сигнала над помехой, необходимое для обеспечения заданных значений D и F; LСДЦ - потери в системе СДЦ, возникающие из-за того, что собственные шумы приемника на выходе устройства режекции становятся коррелированными. Это явление приводит к ухудшению характеристик обнаружения в том случае, когда используется последетекторное накопление импульсов. Как показано в [25], потери для одно-, двух-, трех- и четырехкратных систем ЧПК соответственно составляют 1; 1,8; 2,2; 2,5 дБ при D = 0,9 и F = 10-6. Размер некогерентно интегрируемой пачки брался от 4 до 32 импульсов.
Кажущаяся простота соотношений (4.40) и (4.41), определяющих Кпв и его связь с Ку и qпор, обманчива. Коэффициент подпомеховой видимости зависит от таких параметров, как ширина спектра и интенсивность пассивных помех, требуемых значений вероятностей правильного обнаружения и ложной тревоги. Возвращаясь к определению Кпв. уточним понятие порогового отношения qпор. Обычно за qпор принимают коэффициент наблюдаемости на фоне пассивных помех (аналогичный коэффициенту наблюдаемости на фоне собственных шумов, который был введен Блейком [17] и определен как отношение энергии принимаемого импульса к мощности шума на единицу полосы пропускания, т. е. к энергетическому спектру мощности шума).
Коэффициент наблюдаемости на фоне пассивных помех есть отношение сигнал-помеха на выходе системы СДЦ, которое обеспечивает заданные вероятности правильного обнаружения и ложной тревоги. Когда энергетический спектр остатков пассивных помех имеет вид энергетического спектра собственных шумов приемника, этот коэффициент совпадает по величине с коэффициентом наблюдаемости на фоне собственных шумов. В этом случае можно использовать зависимости, полученные Блейком, и в то же время это напоминает разработчику о необходимости создания фильтра СДЦ с соответствующими характеристиками. Вышесказанное иллюстрируется на рис. 4.1.
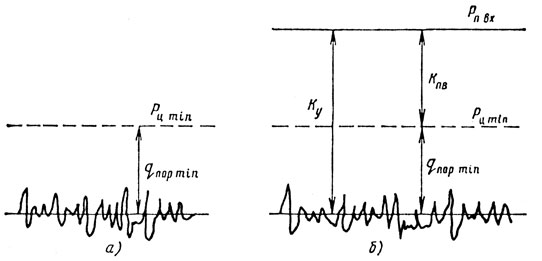
Рис. 4.1
Рассмотрим зависимость Кпв от характеристик помех, которые определяют верхнюю границу его значений. Так как источники пассивных помех, такие как поверхности моря и земли, а также метеообразования и организованные пассивные помехи, имеют различную ширину спектра, Кпв должен определяться для каждого типа помехи отдельно. Однако если источник помехи не определен, то в этом случае как Ку, так и Кпв описывают предельные характеристики РЛС и не связаны с конкретной помеховой обстановкой. Внешние и внутренние факторы, способствующие расширению спектра помехи, приводят к увеличению остатков пассивной помехи на выходе режекторного фильтра, что снижает Ку и соответственно Кпв.
Как отмечено выше, коэффициент Ку не зависит от уровня помех, так как он предполагает линейную обработку сигнала. В то же время коэффициент подпомеховой видимости связывает отношение уровня пассивной помехи с пороговым сигналом. Так как это отношение определяется прежде все го собственными шумами приемника при низком уровне пассивных помех, то очевидно, что подпомеховая видимость должна возрастать по мере увеличения уровня помех. Учитывая, что РЛС работает в большом динамическом диапазоне обрабатываемых сигналов, необходимо точно знать уровень пассивных помех, при которых Кпв может быть измерен.
Чтобы проиллюстрировать изменение Кпв от интенсивности пассивных помех, проанализируем зависимость уровня помех на выходе порогового устройства от уровня помех на входе РЛС. При низком уровне пассивных помех доминирующими будут собственные шумы, которые и определят эффективность СДЦ. Это положение сохранится до тех пор, пока или остатки пассивных помех не превысят собственные шумы приемника, на фоне которых должна обнаруживаться цель, или интенсивность помех на входе достигнет уровня насыщения. В этом случае необходимо использовать различные методы обеспечения ПУЛТ.
Задача поддержания ПУЛТ является важнейшей в обзорных РЛС, поэтому устройства, решающие эту задачу, включаются совместно с режекторными фильтрами. На этом этапе все еще справедлива линейная обработка сигналов, а минимальное значение Рс вых (следовательно, qпор) для достижения заданных D и F остается постоянным. По мере увеличения интенсивности помех (динамического диапазона обрабатываемых сигналов) необходимо использовать различные устройства которые обеспечивают линейную обработку сигналов. Иначе эффективность систем СДЦ резко снижается, что особенно наглядно проявляется при включении в тракте промежуточной частоты ограничителя.
Таким образом, Кпв изменяется в зависимости от интенсивности пассивных помех, и это изменение зависит от способа реализации не только режекторного фильтра, а практически всех трактов РЛС СДЦ, как было показано в гл. 1. Очевидно, что зависимость Кпв от D и F меняется при изменении qпор, значение которого определяется алгоритмом обнаружения и характеристиками флуктуации цели.
Рассмотрим особенности использования Кпв и Ку в импульсно-доплеровских системах. Принципиальное различие между обычными системами СДЦ и импульсно-доплеровскими в том, что режекторный фильтр СДЦ имеет один вход и один выход, в то время как при импульсно-доплеровской обработке имеется набор доплеровских фильтров с общим входом и параллельными выходами по числу фильтров. Структура импульсно-доплеровских систем обработки разнообразна, однако общим для них является наличие параллельно включенных узкополосных фильтров, настроенных на разные доплеровские частоты. Сигналы с выходов этих фильтров детектируются к интегрируются, а затем поступают на пороговые устройства. Квадратурные каналы объединяются, при этом объединение может осуществляться до или после последетекторного интегрирования или порогового устройства. Различные варианты структур импульсно-доплеровских систем создают трудности при использовании Кпв и Ку.
Определение, данное для Ку, справедливо для одного фильтра, и, следовательно, оно может быть применено к каждому отдельному доплеровскому фильтру без каких-либо изменений. В этом случае Ку должен быть найден для каждого из доплеровских фильтров усреднением по всему диапазону скоростей. Такое приближение используется, но оно обычно приводит к занижению характеристик от дельного фильтра.
Как отмечалось выше, коэффициент Кпв изменяется при изменении уровня помехи, что требует точного значения помеховой обстановки. Определение помеховой обстановки, а следовательно, и Кпв - достаточно трудная задача, по этому в такой ситуации целесообразно определить максимально достижимое значение Кпв и согласовать его с соответствующим уровнем пассивных помех [61]. На ранних стадиях разработки РЛС СДЦ для дальнейших расчетов можно использовать предельное значение Кпв, которое определяется по измеренным величинам динамического диапазона входных сигналов и qпор. Можно показать, что
Для обеспечения ПУЛТ необходимо, чтобы по крайней мере Рп вых = Рш вых, тогда
Максимальное значение Ку принимает при Рп вх max, при котором осуществляется линейная обработка сигналов в приемнике РЛС.
Если динамический диапазон РЛС СДЦ определять как d = Рп вх max/Рш вх, то Ку ≤ d и, следовательно, Кпв ≤ dпор.
И, наконец, отметим, что для определения Кпв в большинстве случаев предлагается выбирать вероятность правильного обнаружения равной 0,5 [48, 49, 61]. Это объясняется тем, что в этом случае значения D могут быть измерены с большой точностью и в меньшей степени зависят от характера флуктуации цели.
В заключение параграфа остановимся на влиянии на эффективность РЛС СДЦ ее характеристик разрешения, которое проявляется в возникновении эффекта, называемого межпомеховой видимостью (MB) [601 и представляющего собой способность РЛС разрешать области пространства, занятые источниками пассивных помех таким образом, что между ними может быть обнаружен сигнал от движущейся цели. Количественной меры MB не существует, но тем не менее этот эффект использовался в системах СДЦ, например в цепях обработки типа "lg - МПВ", эффективность работы которых не может характеризоваться Кпв.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'