
7.4. Примеры адаптивных систем СДЦ
В последнее время осуществлены многочисленные разработки обнаружителей движущихся целей, учитывающие такие особенности работы систем, как негауссовость помех, наличие одновременных отражений от гидрометеоров и поверхности и др. Например, в [98] описана адаптивная система со стабилизацией уровня ложных тревог (рис. 7.18).
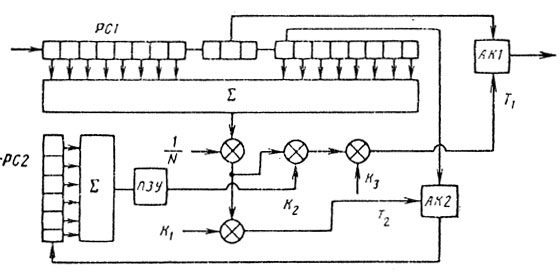
Рис. 7.18
Регистр сдвига РС1 записывает уровень отраженных сигналов и помех в ячейки дальности с последующим усреднением значений ячеек в районе, прилегающем к ячейке с целью. Порог Т1 формируется умножением сред него значения уровня помехи на коэффициенты К2 и К3.
Величина К2 извлекается из ПЗУ. на основании сигнала счетчика ложной тревоги на регистре РС2, который функционирует следующим образом. Умножением на коэффициент К1 формируется порог Т2 для амплитудного компаратора АК2. На второй вход компаратора подается сигнал с ячейки РС1, в которой заведомо имеется только сигнал помехи. При превышении помехой порога Т2 вырабатывается единица, при непревышении - нуль, которые и записываются в регистр РС2, а затем считываются сумматором. Величина К3 выбирается, чтобы обеспечить заданную вероятность ложной тревоги при обнаружении на фоне шума с рэлеевским распределением амплитуды. Порог Т1 вводится в амплитудный компаратор АК1, где осуществляется обнаружение сигнала цели со средней ячейки РС1.
Было выяснено, что при записи в РС1 сигналов целей и помех возникают потери. Например, при превышении сигнала над помехой в 10 дБ и записи этих сигналов в 10% ячеек РС1 возникают потери в 2 дБ 183). С помощью логики вырезания сигналов из входных реализаций при записи в РС1 можно этих потерь избежать (рис. 7.19).
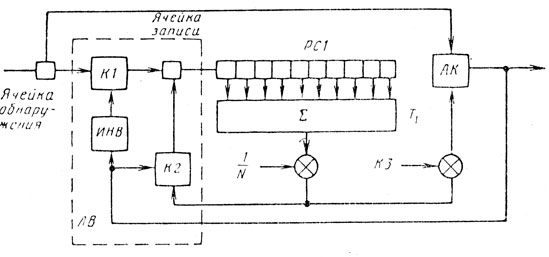
Рис. 7.19
На входе в ячейки РС1 ставится ячейка обнаружения, на выходе которой стоит устройство логики вырезания сигналов (ЛВ), работающее таким образом, что по сигналу обнаружения цели (превышения в АК порога Т1) срабатывает на закрывание ключ К1 и на открывание ключ К2. Поэтому сигнал цели не проходит в ячейку записи и туда записывается через К2 средний уровень помехи Инвертор (ИНВ) обеспечивает переворот сигнала с +1 на -1 для запирания ключа К1.
В [84] описана система СДЦ с введением в логику адаптивной системы со стабилизацией ложных тревог и регулировкой чувствительности (ослабления) мер по уменьшению потерь из-за маскировки цели гидрометеорами и по понижению уровня ложных тревог из-за неподавленных отражений от поверхности в присутствии гидрометеоров (рис. 7.20). Блок фазовых детекторов выдает две квадратурные составляющие на устройство управления чувствительностью, которое осуществляет ослабление входных сигналов ступенями в 6 дБ по сигналам управления системы, состоящей из арифметического устройства (АУ), логики управления и памяти управления чувствительностью. В основу работы системы положено изменение чувствительности или ослабления входных сигналов в зависимости от результата сравнения уровня сигнала в настоящий момент и прогнозируемого уровня сигнала в следующий момент времени.
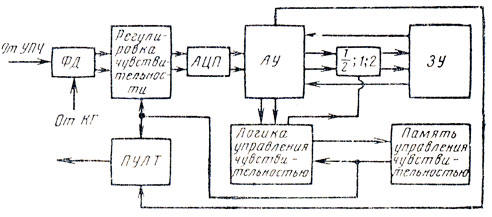
Рис. 7.20
Арифметическое устройство, устройство умножения и память на три периода повторения составляют трехкратную систему подавления (ЧПВ) помех, эквивалентные схемы которой показаны на рис. 7.21, а и б. Стабилизатор уровня ложных тревог, обеспечивающий лучшую работу системы при одновременном появлении отражений от поверхности и гидрометеоров, показан на рис. 7.22. На входе и выходе системы стоят логарифмический и экспоненциальный преобразователи. Цель подразумевается расположен ной в ячейках регистра, больших или равных х, и находя среднее значение величины помехи по логарифму величины сигналов с выхода системы СДЦ в верхнем регистре РС2 и по величине сигнала управления чувствительностью в нижнем регистре РС3, мы исключаем подавление сигнала в ячейке обнаружения остатками сигналов гидрометеоров. В то же время использование для усреднения сигналов управления чувствительностью и коррекция в связи с этим входных сигналов РС2 предотвращают увеличение вероятности ложных тревог из-за недокомпенсации смеси сигналов поверхности и гидрометеоров.
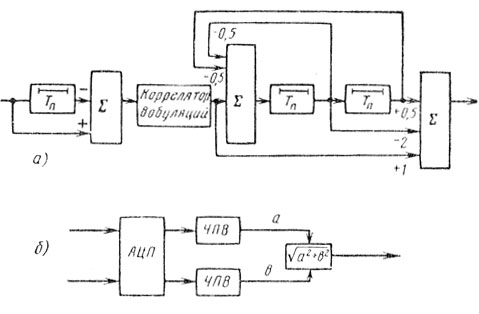
Рис. 7.21
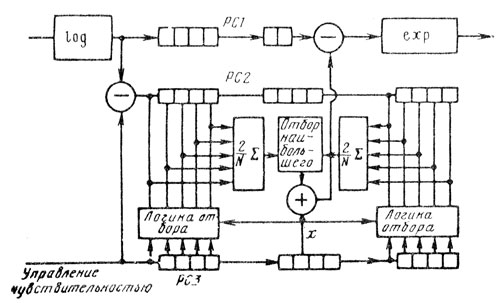
Рис. 7.22
В [86] описаны РЛС фирмы "Селения" для сопровождения низколетящих целей на дальностях до 50 км с использованием импульсно-доплеровского режима излучения коротких импульсов с высокой частотой повторения при сопровождении целей и импульсов с фазокодовой модуляцией при обнаружении целей. РЛС построены по истинно когерентной схеме с передатчиком на твердотельном задающем генераторе и мощном усилителе на ЛБВ. Приемник многоканальный, обслуживающий моноимпульсную антенную систему. При обработке сигналов используются аналоговые - устройства на поверхностных акустических волнах (ПАВ) и приборах с зарядовой связью (ПЗС), а также цифровая техника на микропроцессорах. В станции предусмотрена адаптация к помеховой обстановке. На рис. 7.23 показана структурная схема приемника РЛС. Трехканальный УПЧ с регулировкой усиления предназначен для усиления сигналов суммарного (2) и двух разностных каналов.
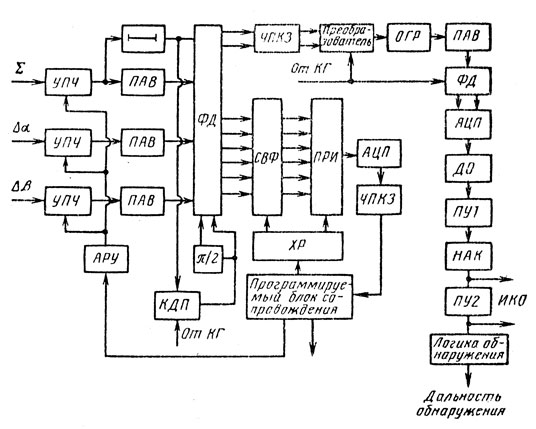
Рис. 7.23
В выходных каскадах предусмотрены фильтры сжатия фазокодированных сигналов на ПАВ. Используется 13-значный код Баркера. Обнаружение целей производится с помощью канала, подключенного перед ПАВ суммарного канала, при этом предусмотрена линия задержки, компенсирующая задержки в фильтрах ПАВ. С помощью двух фазовых детекторов в каждом из четырех каналов формируются квадратурные составляющие для последующей обработки информации. Опорным сигналом служит сигнал когерентного гетеродина (КГ) с внесенной фазовой поправкой на скорость движения пассивных помех. Поправка вводится с помощью блока компенсации движения помех (КДП), приближенная структура которого показана на рис. 7.24.
На два смесителя квадратурных каналов через жесткий ограничитель подаются сигнал с линии задержки канала обнаружения Uc(t) = cos [ω0t + φд(t) + φ0] и опорный сигнал КГ, пропущенный через управляемый фазовращатель (УФВ) Uкг(t) = cos φоп(t). На входе ФД с учетом сложения квадратурных составляющих однополосных смесителей и задержки сигналов на период повторения в линиях задержки будут составляющие:
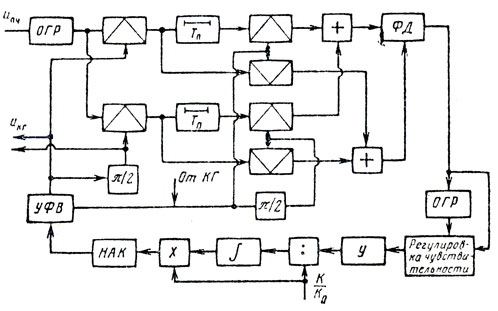
Рис. 7.24
На выходе фазового детектора формируется напряжение, пропорциональное разности фаз сигнала:
Для устранения цикличной зависимости сигнала от фазы используются линейный участок дискриминационной характеристики в пределах ±22,5° и ограничитель на выходе фазового детектора с последующим регулированием чувствительности (рис. 7.24). Для усреднения полученных значений включается интегратор. При текущих значениях fопТп получается усиление в петле регулирования K, однако и fоп, и Тп в процессе работы меняются из-за изменения несущей частоты и вобуляции частоты повторения. Поэтому для стабилизации обратной связи и обеспечения устойчивости интегрирование осуществляется всегда в одних и тех же условиях с помощью делителя и умножителя до и после интегратора, а также используется деление и умножение выходного напряжения фазового детектора на величину K/K0, где К0 - коэффициент усиления петли для средней частоты повторения и частоты регулирования. Накопитель (НАК) производит накопление сигналов и управление фазовращателем. Выходное напряжение служит для приемника опорным.
Квадратурные сигналы в канале обнаружения (рис. 7.23) поступают на трехкратную систему ЧПКЗ, выполненную на ПЗС и обеспечивающую коэффициент подавления отражений от земной и морской поверхности 40 дБ и от гидрометеоров 32 дБ. Далее сигналы вновь преобразуются на промежуточную частоту, ограничиваются и сжимаются фильтрами ПАВ. На фазовых детекторах вновь формируются квадратурные составляющие, которые за тем с помощью 6-разрядного АЦП переводятся в цифровой код. Из цифровых последовательностей с помощью ДО выделяется огибающая. Пороговые устройства ПУ1 и ПУ2 обеспечивают совместно с устройством логики обнаружения постоянство уровня ложных тревог с адаптацией порогов и обнаружение по одному из критериев. В частности, при использовании фазокодовой модуляции с ограничением перед ПАВ можно применять фиксированный первый порог с последующим накоплением и адаптивным ПУ2. При коротких импульсах осуществляется адаптация первого порога обнаружения. Накопитель и адаптивное ПУ2 применяются для борьбы с нескомпенсированными остатками, принятыми по боковым лепесткам антенны.
Приемник обеспечивает вероятность правильного обнаружения 0,8 при вероятности ложных тревог 10-6. Со провождение осуществляется после СВФ и управляемого хронизатором (ХР) переключателя (ПР). Быстродействие этих схем, равное 64 МГц, обеспечивает сопровождение двух разнесенных целей одновременно. С помощью 12-разрядного АЦП и трехкратной цифровой ЧПКЗ подавляются пассивные помехи в 64 анализируемых элементах дальности. После этого в программируемом блоке сопровождения формируются сигналы сопровождения целей по дальности и углам и сигналы регулировки усиления. Моноимпульсные разностные каналы имеют динамический диапазон 65 дБ, требуют наличия эффективной АРУ и 12-разрядных АЦП. Устройства сопровождения и программируемый блок выполнены на микропроцессорах с быстродействием 4 млн. операций в секунду.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'