
Глава 8. Скоростные характеристики систем СДЦ
8.1. Проблема "слепых" скоростей
Спектр пассивных помех, как перемещающихся, так и неподвижных, в случае импульсных РЛС имеет периодическую структуру с максимальными значениями для частот, кратных Fп. Для режекции пассивных помех требуется фильтр с гребенчатой передаточной функцией. Полосы режекции такого фильтра должны соответствовать областям, где находится помеховый сигнал. В случае попадания в эту область сигнала от цели, что происходит при fдс = nFп (n = 0, 1, 2, ...), он так же, как и сигнал помехи, режектируется, т. е. образуются "слепые" зоны. Радиальная скорость цели, сигнал которой попал в зону режекции, называется также "слепой". Зависимость между различными значениями "слепых" скоростей, однозначно определяемой дальностью до цели, периодом повторения зондирующих импульсов Fп и длиной волны λ выражается следующим образом:
где υсл n - n-я "слепая" скорость, с - скорость света; R0 - однозначно определяемая дальность.
"Слепые" скорости налагают ограничения на работу импульсной РЛС СДЦ, которых не существует для РЛС с непрерывным излучением. Это связано с тем, что в импульс ной РЛС доплеровская частота измеряется не непрерывно, а дискретно в соответствии с частотой повторения импульсов. РЛС с непрерывным излучением является "слепой" для целей, радиальная скорость которых близка к нулю. Импульсная РЛС является "слепой" и для целей, радиальные скорости которых удовлетворяют условию (8.1).
Очевидно, что если первая "слепая" скорость должна быть больше ожидаемой максимальной радиальной скорости цели, то произведение λFп должно быть большим. Отсюда следует, что РЛС СДЦ должна работать на сравнительно длинных волнах, или иметь высокую частоту повторения импульсов, либо одновременно удовлетворять обоим условиям. Однако длина волны и частота повторения определяются, как правило, не заданными значениями "слепых" скоростей, а другими требованиями. Поэтому избежать появления "слепых" скоростей в РЛС СДЦ практически невозможно. Недостаток работы на низких частотах со стоит в том, что ширина луча ДНА при ее заданных размерах получается больше, чем при работе на высоких частотах, что не удовлетворяет требованиям, предъявляемым к аппаратуре в тех случаях, когда требуется обеспечение высокой точности определения угловых координат. Частоту повторения не всегда можно изменять в широких пределах, так как она за дается главным образом требованием однозначного определения дальности.
На рис. 8.1 приведены зависимости значений первой "слепой" скорости от рабочей длины волны и максимального значения однозначно определяемой дальности [94]. Так, если первая "слепая" скорость равна 300 м/с, то максимальная однозначная дальность составит 250 км на частоте 3000 МГц. Очевидно, что "слепые" скорости отрицательно влияют на работу РЛС.
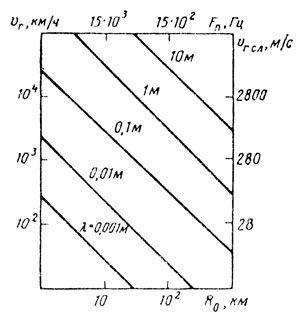
Рис. 8.1
Практически РЛС СДЦ, предназначенные для обнаружения воздушных целей на больших дальностях и использующие длины волн от 30 см и менее, должны работать в условиях неоднозначного определения доплеровской частоты и "слепыми" скоростями, если необходимо однозначное определение дальности. Наличие "слепых" скоростей в диапазоне доплеровских частот значительно ухудшает процесс обнаружения. В тех случаях когда требуется обеспечить качественную работу системы СДЦ ценой неоднозначного определения дальности, можно вывести первую "слепую" скорость за ожидаемый диапазон доплеровских частот.
Неоднозначность определения дальности обычно устраняется при использовании нескольких периодов повторения. Но при этом значительно усложняется конструкция РЛС и требуется большее время облучения цели, что уменьшает скорость обзора пространства. Кроме того, ухудшаются характеристики системы СДЦ.
Наиболее распространенным методом устранения "слепых" скоростей является вобуляция периода повторения зондирующих импульсов. В настоящее время разработано несколько методик расчета скоростных Характеристик для различных путей технической реализации режекторных (обычно цифровых) фильтров. При этом под скоростной характеристикой режекторного фильтра будем понимать зависимость от доплеровской частоты (радиальной скорости цели) усредненного по всем случайным параметрам квадрата модуля коэффициента передачи.
При выборе межимпульсных интервалов необходимо учитывать требования, которые зависят от общих тактико-технических требований, обычно предъявляемых к РЛС СДЦ:
существует минимальный межимпульсный период Тп min, который определяется требованием однозначного определения дальности;
цель должна быть обнаружена в течение заданного времени, что определяет длительность пачки отраженных импульсов. Обычно время облучения цели минимизируется для заданных значений вероятностей правильного обнаружения и ложной тревоги;
скоростная характеристика схем режекции пассивной помехи в полосе прозрачности должна быть по возможности плоской, так как наличие глубоких провалов в точках бывших "слепых" скоростей приводит к резкому снижению эффективности систем СДЦ.
Таким образом, при анализе скоростных характеристик системы СДЦ необходимо последовательно рассматривать следующие проблемы:
анализ спектрально-корреляционных свойств зондирующего сигнала с переменным периодом повторения;
разработка методик расчета скоростных характеристик различных схем режекции пассивных помех;
анализ влияния вобуляции периода повторения импульсов на эффективность систем СДЦ.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'