
Глава 10. Особенности бортовых РЛС СДЦ
10.1. Селекция движущихся целей при движении РЛС
Прежде всего рассмотрим такую особенность бортовых РЛС, как движение по определенной плоской или пространственной траектории относительно подстилающих поверхностей, облака метеообразований, дипольных полях или ионизированных частиц. При этом сигналы, отраженные от источников пассивных помех, могут приниматься не только по главному лепестку ДНА, но и по боковым. И, наконец, необходимо связывать форму зондирующего сигнала с кинематикой цели и источника помех, а также с формой ДНА.
При движении когерентно-импульсной РЛС неподвижные относительно поверхности земли цели перемещаются относительно РЛС с различными радиальными скоростями. Это происходит при установке когерентно-импульсных РЛС на летательных аппаратах, кораблях, автомобилях и т. п. Сигналы неподвижных относительно земли целей получают соответствующие поправки Доплера по частоте. Следовательно, они не могут быть подавлены с помощью фильтров или системы компенсации. Задача селекции усложняется в этом случае и тем, что антенная система РЛС может работать в режиме обзора пространства, т. е. изменять положение диаграммы направленности в пределах 360° по азимуту и 90° по углу места. В соответствии с рис. 10.1 радиальная скорость перемещения цели и РЛС относительно точки М на поверхности, на которую направлен максимум ДНА,
где αM и βM - соответственно азимут цели и угол места цели в точке М; γM - угол между вектором путевой скорости и направлением на цель в точке М; υ - путевая скорость.
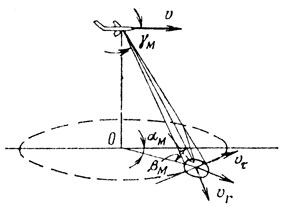
Рис. 10.1

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'