
10.2. Компенсация эффекта движения РЛС
Компенсация движения в РЛС с внешней когерентностью получается автоматически. Дело в том, что при движении РЛС относительно поверхности земли разность частот движущихся и неподвижных относительно земли целей не будет изменяться. Пусть fд - доплеровская частота сигнала биений движущейся и неподвижной целей; fдц - доплеровская частота движущейся цели; fдз - доплеровская частота сигнала цели, неподвижной относительно земли, а υr, υrц, υrз - соответствующие скорости движения, тогда
Таким образом, доплеровская частота биений оказывается пропорциональной радиальной скорости движения движущейся цели относительно неподвижной. Для компенсации эффекта движения когерентно-импульсной РЛС с внутренней когерентностью необходимо ввести поправку в частоту или фазу опорного сигнала, причем эта поправке должна быть пропорциональна величине радиальной скорости цели υrM. Поскольку при обзоре пространства υrM есть величина переменная, то и поправка должна изменяться синхронное движением луча антенны [1, 98]. Поправка
Структурная схема РЛС с устройством введения поправок в опорный сигнал показана на рис. 10.2.
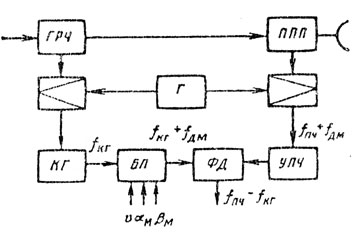
Рис. 10.2
Блок ввода поправок (БП) может выполняться различным образом. Например, он может строиться по схеме смесителя, когда выделяется и отфильтровывается одна боковая составляющая преобразованного сигнала когерентного гетеродина и генератора частоты Доплера, управляемого счетно-решающим прибором. Блок ввода поправок получается достаточно сложным и требует точного измерения и введения вели чины путевой скорости υ, углов αM и βM, а это можно осуществить простыми техническими средствами только на промежуточной частоте.
Эффект движения бортовой РЛС будет сказываться на деформации спектра помех от подстилающей поверхности при обзоре пространства (рис. 10.1). При этом спектр помех, получаемых по главному лепестку ДНА, меняет свое положение на частотной оси от f0 + nFп + fдз max при α0 = 0 до f0 + nFп - fдз max при α0 = 180°, где n = 0; ±1, ±2; ... - номер компоненты частоты повторения, отсчитываемой от несущей f0. Следовательно, необходим непрерывный ввод поправок на движение радиолокатора для совмещения максимумов спектра помех с полосами режекции фильтров подавления помех. Здесь должны формироваться жесткие требования на точность такого совмещения до долей процентов (0,05 %) [98].
Кроме того, при обзоре изменяется (деформируется) ширина спектра помех, принимаемых по главному лепестку ДН. В соответствии с рис. 10.1 ширина этого спектра доплеровских частот [1]
где α - азимут подсвечиваемого участка; α0,5 - ширина главного лепестка по уровню половинной мощности.
Учитывая, что α0,5 ≈ λ/dt где d - диаметр антенны, получаем
При аппроксимации главного лепестка кривой Гаусса ширина спектра [98]
Эффект воздействия движения РЛС можно свести к изменению фазы приходящих сигналов за счет изменения расстояния до высвечиваемого пятна за период повторения

Тогда для того, чтобы компенсировать набег фазы Δφ, необходимо смещать фазовый центр антенны от периода к периоду повторения на величину ΔR, обеспечивая сдвиг фаз Δφ.
При использовании суммарно-разностной моноимпульсной системы с фазовым угловым датчиком, база которой расположена вдоль линии движения (рис. 10.3, а [8]), разность фаз сигналов U1 и U2
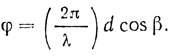
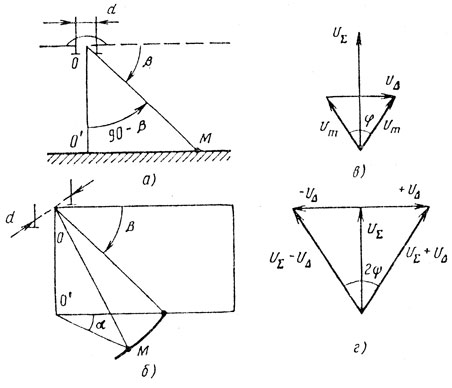
Рис. 10.3
Формируя сумму U∑ и разность UΔ сигналов U1 и U2 и затем складывая и вычитая их (рис. 10.3, в, г), получаем, что вектор U∑ - UΔ повернут относительно вектора U∑ + UΔ на угол 2ψ, где
ψ = arctg (UΔ/U∑) = arctg tg (φ/2) = φ/2
(рис. 10.3, в), поэтому
Если обеспечить условие
то сдвиг фаз Δφ за счет смещения антенны при движении будет скомпенсирован. Расширение же спектра при сканировании антенны в горизонтальной плоскости тоже можно скомпенсировать, если рассмотреть ту же суммарно-разностную систему, но с фазовым угловым датчиком с горизонтальной базой, расположенным поперек движения (рис. 10.3, б). В этом случае φ = (2π/λ) d sin α. Как и в предыдущем случае, согласно векторным диаграммам рис. 10.3, в, г:
Поэтому, подбирая Δφ = ΔfдТп равным 2ψ, получаем условие компенсации расширения спектра:

Это условие выполняется при выборе размера горизонтальной базы антенны в соответствии с путевой скоростью и периодом следования импульсов

На рис. 10.4 показана структурная схема РЛС летательного аппарата [9], использующая принцип компенсации собственного движения летательного аппарата на основе соотношения (10.4). Изменяется расстояние d между фазовыми центрами двух подрешеток ФАР. Число элементов (облучателей) ФАР в направлении полета равно 600. Первые 100 элементов (i = 1÷100) и последние 100 (i = 500÷600) отключаются и подключаются с помощью ключей поочередно в четных и нечетных периодах повторения, тем самым смещая вперед и назад апертуру антенны в пределах ±100b, где b - расстояние между соседними облучателями. В результате фазовый центр смещается вдоль линии полета самолета на расстояние ±100b. Меняя число отключаемых и подключаемых элементов подрешеток i = 1 ÷ (1 + К) и i = 500 ÷ (500 + К), где К = 0÷100, получаем две апертуры с изменяемой длиной и переменным положением фазовых центров в пределах К = 0÷100. ФАР имеет краевые коммутируемые облучатели 1 и 3 и средние некоммутируемые элементы 2, Управление лучом и его форма определяются управляемыми фазовращателями (ФВ) и аттенюаторами (АТ). Отключение и включение элементов осуществляются ключами (КЛ) и коммутатором (КОМ), управляющим расстоянием d, на основе измеренного и вычисленного коэффициента подавления помехи Кп. Все элементы (ряды элементов) ФАР подключены к приемному устройству (ПРМ), на выходе которого с помощью фазовых детекторов (ФД) и квадратурных сигналов когерентного гетеродина (КГ) образуется два квадратурных сигнала. Эти сигналы преобразуются с помощью АЦП в цифровой код, после чего осуществляется подавление пассивных помех в цифровом режекторном гребенчатом фильтре (ЦРГФ). Сигналы с входа и выхода ЦРГФ подаются на вычислитель, где и определяются Кп в соответствии с (4.1) и средняя доплеровская поправка fд ср отражений от земной поверхности. Когерентный гетеродин перестраивается управляющим сигналом пропорционально fд ср, и этим достигается слежения за скоростью движения фона. В зависимости от значения К и осуществляется минимизация нескомпенсированных остатков помехи на выходе ЦРГФ или, что то же самое, максимизация величины Кп путем подбора d в соответствии со скоростью полета. Обратное преобразование цифрового кода с помощью ЦАП позволяет подавать сигнал на индикатор (И), автомат захвата (АЗ) и системы (АСН) и (АСД).
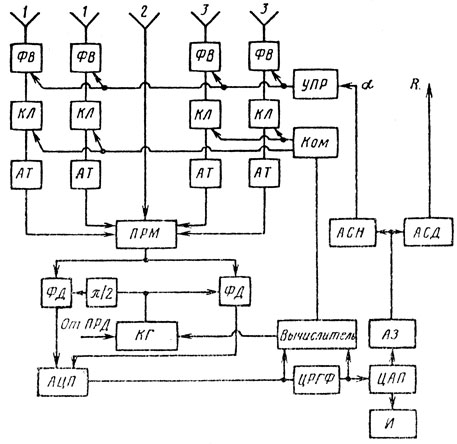
Рис. 10.4

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'