
10.4. Особенности выбора зондирующего сигнала в бортовых РЛС
Выбор или синтез радиолокационного (РЛ) сигнала может проводиться в первую очередь путем перебора различных сигналов и сравнения их функций неопределенности по выбранному критерию эффективности. Как показано в ряде работ [4, 8, 11], критерием качества сигнала могут служить следующие характеристики функции неопределенности РЛ сигналов:
1) ρ(τ, 0), ρ(0, Ω) - с точки зрения поведения отклика системы оптимальной обработки по времени или частоте;
2) δτ(Ω,) δΩ(τ) - с точки зрения разрешения по времени или частоте;
3)  - с точки зрения точности определения положения отклика на временной или частотной оси;
- с точки зрения точности определения положения отклика на временной или частотной оси;
4) с точки зрения площади области взаимного перекрытия функций неопределенности и интенсивности распределения помех Е(τ, Ω) (рис. 10.17).
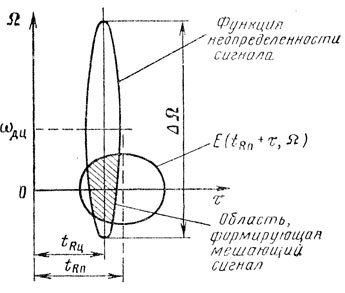
Рис. 10.17
При этом тот сигнал целесообразнее, который обеспечивает наименьшую область перекрытия с функцией Е(τ, Ω) и, следовательно, наибольшее отношение сигнал-помеха на выходе системы обработки. Применительно к задаче обнаружения низколетящей цели бортовой РЛС нахождение точного выражения Е(τ, Ω) - трудоемкая задача, связанная с кинематикой системы "самолет-помеха" и характеристиками антенной системы РЛС [1]. Однако, упростив задачу, можно предсказать примерный вид функций Е(τ, Ω) [1].
В самом деле, пусть антенная система имеет диаграмму направленности, состоящую из главного лепестка и боковых лепестков в виде сферы, причем главный лепесток слегка наклонен в вертикальной плоскости (ξ ≠ 0) и не совпадает с вектором скорости летательного аппарата. Тогда по боковым лепесткам будем принимать отражения от земли (пассивные помехи) в пределах Rmin = H, Rmax → ∞ и υmax = ±υ. Причем нужно учесть, что наибольшая интенсивность отражений будет на малых R → Rmin, а наименьшая - на больших R. Поэтому боковые лепестки дадут функцию распределения интенсивности помех на плоскости R, υ, показанную на рис. 10.18, [101]. Кроме того, мешающие отражения, принятые по главному лепестку, разместятся в плоскости R, υ в виде возвышения, вытянутого по оси R. Там же показано положение эффективной площади рассеяния точечной цели Sц с координатами Rц, υц. Примерный вид следа сечения функции Е(τ, Ω) в плоскости τ, Ω показан на рис. 10.19 (А и В - соответственно сечения по боковому и главному лепесткам ДНА).
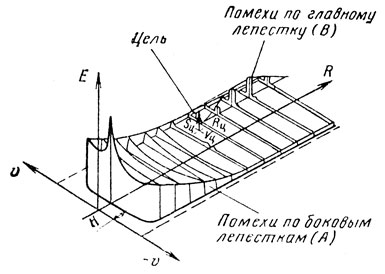
Рис. 10.18
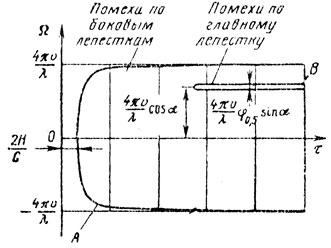
Рис. 10.19
При просмотре пространства главным лепестком область В диаграммы распределения помех Е(τ, Ω) может изменять положение в пределах ±Ωmax по частоте (скорости) и по τ в пределах от τн до бесконечности, в зависимости от положения главного лепестка относительно поверхности земли (α0, β0) и вектора скорости ЛА.
При решении задачи выбора - оптимального сигнала максимизирующего отношение мощностей сигнала и помех на выходе оптимальной системы обработки, необходимо добиться наименьшего перекрытия диаграммы неопределенности зондирующего сигнала и следа функции распределения помех. На рис. 10.20 показаны функции распределения помех и варианты диаграммы неопределенности РЛ сигналов для конкретной тактической ситуации и кинематических характеристик цели и РЛС. Здесь приведены диаграммы неопределенности четырех сигналов с одинаковой энергией: а - короткий радиоимпульс с постоянной несущей частотой; б - длинный радиоимпульс с постоянной несу щей частотой; в - радиоимпульс с внутриимпульсной линейной частотной модуляцией (ЛЧМ) несущей частоты с убыванием несущей частоты; г - ЛЧМ импульс с возрастающей несущей частотой и след функции распределения помех для случаев υ > υц, α0 = 0, β0 = 0. Видно, что по заданному критерию сигналы а, б и в примерно эквивалентны и имеют преимущество перед сигналом г. Очевидно, эти преимущества могут быть оценены по другим критериям, например по разрешающей способности, точности и т. п.
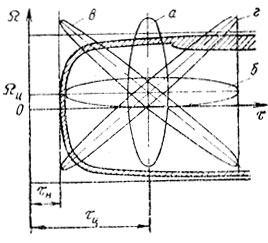
Рис. 10.20
Вместо перебора различных сигналов иногда можно осуществить синтез сигнала. В этом случае процесс синтеза распадается на два этапа: выбор целесообразной формы функции неопределенности РЛ сигнала, исходя из конфигурации функции распределения помех, и регулярного синтеза сигнала по выбранной функции неопределенности или модуля двумерной корреляционной функции [8, 13, 14].
Однако следует сразу отметить, что весьма трудно в замкнутой форме найти удачную аппроксимацию функции неопределенности и не во всех случаях удается синтез сигнала по полученной двумерной корреляционной функции [13, 99].
С помощью диаграммы распределения помех Е(τ, Ω) и функции неопределенности сигнала можно выявить преимущества формы зондирующего сигнала и осуществить выбор частоты повторения в импульсно-доплеровских РЛС [101]. На рис. 10.21, а показан случай использования на ЛА импульсно-доплеровской РЛС с высокой (100-200 кГц) частотой повторения (и, следовательно, с малым периодом повторения Тп). Видно, что при малом доплеровском сдвиге (малая скорость или сближение в задней полусфере) функция неопределенности сигнала, которая выглядит как горизонтальная последовательность, точек, перекрывается с функцией распределения помех, что затрудняет выделение цели, а при большом доплеровском сдвиге (сближение в передней полусфере) цель легко обнаруживается, так как пересечения диаграммы неопределенности и функции распределения помех нет. Следует лишь отметить, что имеется неопределенность по дальности ("слепые" дальности).
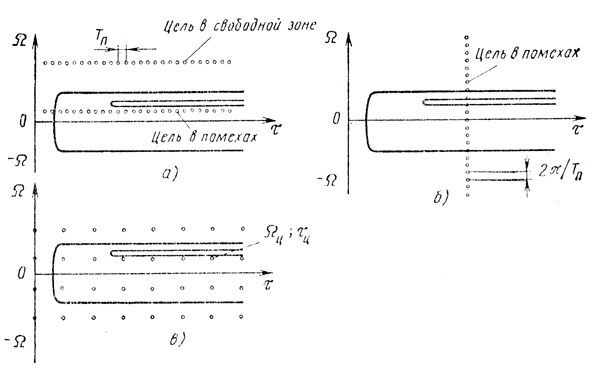
Рис. 10.21
При низкой (порядка 1 кГц) частоте повторения (НЧП) (большой период повторения) функция неопределенности сигнала, которая выглядит как вертикальная последовательность точек, перекрывается с функцией распределения помехи (рис. 10.21, б). При этом возникает трудность из-за пересечения функции неопределенности с областью отражения по главному лепестку. Кроме того, из-за низкой частоты повторения имеется неопределенность по скорости ("слепые" скорости").
Уменьшение негативных свойств импульсно-доплеровских РЛС с низкой и высокой частотами повторения возможно при переходе к средней (2-20 кГц) частоте повторения (СЧП). При этом получается неопределенность и по скорости, и по дальности, но облегчается обнаружение целей на фоне отражений от земли (рис. 10.21, в).
Кроме указанных критериев выбора зондирующего РЛ сигнала в бортовых РЛС могут использоваться или, во всяком случае, играть существенную роль при выборе сигналов и другие критерии [например, критерий равномерности функции ρ(0, Ω)], эквивалентные критериям равномерности скоростных характеристик в системах СДЦ [1].

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'