
10.5. Особенности построения бортовых РЛС
Современные бортовые РЛС можно подразделить на РЛС с высокой скважностью или, как их иногда называют, РЛС с низкой частотой повторения и РЛС с малой скважностью, которые могут использовать высокую и среднюю частоты повторения [1]. Что касается бортовых РЛС с низкой частотой повторения, то их можно реализовать как с внешней, так и с внутренней когерентностью.
Примером бортовой РЛС с высокой скважностью может служить самолетная РЛС [9], показанная на рис. 10.22. РЛС работает в режиме с внешней когерентностью и использует в качестве опорного сигнала отражения от подстилающей поверхности, чем и достигается автокомпенсация собственного движения самолета. Импульсы передатчика (ПРД) через переключатель "прием-передача" (ППП) излучаются через антенну в пространство. Отраженные от цели и подстилающей поверхности сигналы после усиления в УПЧ супергетеродинного приемника поступают на ФД, где и про исходит выделение информации о движении цели относительно поверхности. Для обнаружения движущихся целей сигналы с выхода ФД подаются на фильтровую систему (ФС) (рис. 2.27), с выхода которой попадают на обнаружитель с ПУЛТ, а затем на индикатор (И). В режиме автосопровождения срабатывает автомат захвата (АЗ), по команде которого включаются системы автосопровождения по дальности (АСД) и автосопровождения по направлению (АСН) Система АСД состоит из обычного импульсного автодальномера с временным дискриминатором на селекторных каскадах (СК) и дифференциального усилителя (ДУ).
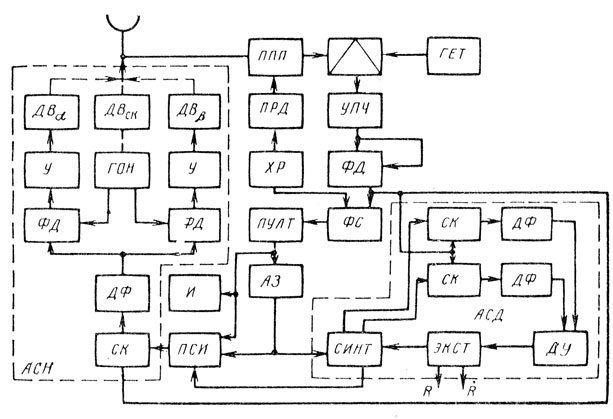
Рис. 10.22
Для сопровождения движущихся целей в плечи дискриминатора включены доплеровские фильтры (ДФ). Экстраполятор (ЭКСТ) выделяет информацию о параметрах движения цели (R, υr), а синтезатор (СИНТ) вырабатывает и задерживает относительно импульса хронизатора (ХР) во времени три импульса, два из которых являются селекторными для дальномера, а один, совпадающий с импульсом цели, используется для стробирования селекторного каскада системы АСН. До канала сопровождения по дальности селекторный каскад стробируется импульсами канала обнаружения. Команду переключения на схему переключателя селекторных импульсов (ПСИ) выдает автомат захвата. Система АСН защищена от отражений поверхности доплеровским фильтром. Принцип автосопровождения - коническое сканирование - основан на сравнении сигналов генератора опорного напряжения (ГОН) и сигнала ошибки с ДФ. На рис. 10.23 показана структурная схема РЛС высокой скважности с низкой частотой повторения, работающая в режиме внутренней когерентности [10]. Здесь в качестве опорного сигнала для квадратурных ФД используется сигнал КГ, фазируемого сигналом передатчика. После АЦП сигналов комплексные цифровые сигналы квадратурных каналов обрабатываются в каналах дальности. В каждом канале дальности стоят ЦРГФ и компенсатор собственного движения самолета, работающий в режиме адаптации. Специальный вычислитель усредняет доплеровскую поправку в пределах данного канала дальности и ряда соседних элементов азимута, формируя компенсирующий сигнал, который обеспечивает изменение фазы сигнала на fдТп.
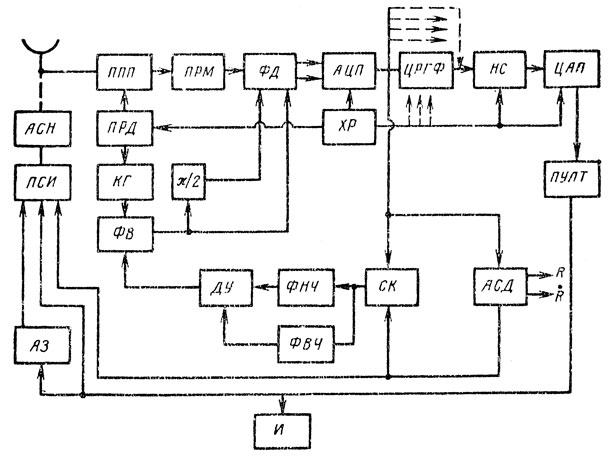
Рис. 10.23
Используя алгоритм (5.19), с помощью компенсатора вносят поправку в комплексный цифровой сигнал, после чего по одному из алгоритмов череспериодного вычитания осуществляют подавление пассивной помехи от поверхности земли. Для обработки всей пачки импульсов в целом используется некогерентное накопление в накопителе сигналов (НС). Затем осуществляется цифро-аналоговое преобразование в ЦАП, обнаружение сигналов в обнаружителе с ПУЛТ и вывод информации на И и АЗ. Для внесения поправок на движение в режиме автосопровождения имеется анализатор, который состоит из селекторного каскада (СК), управляемого импульсом с синтезатора дальномера, опережающим импульс цели, фильтров низкой частоты (ФНЧ) и высокой частоты (ФВЧ) и дифференциального усилителя (ДУ), управляющего фазовращателем (ФВ), через который проходит сигнал когерентного гетеродина к фазовым детекторам. Анализатор по сигналам пассивной помехи вносит поправку в этот сигнал на собственное движение самолета путем ввода фазового сдвига и устраняет возможность автосопровождения помехи. Переключатель селекторных импульсов (ПСИ), управляемый сигналом автомата захвата, стробирует систему АСН импульсом с канала обнаружения или с канала АСД.
Самолетные РЛС с высокой частотой повторения предназначены для обнаружения воздушных целей, движущихся на встречных курсах, на фоне отражений от земли. В этом случае частота повторения, выбираемая в соответствии с (10.17), оказывается высокой и не обеспечивает однозначного измерения дальности. При этом спектр помех формируется за счет суммирования отражений с колец дальности (рис. 10.8). В случае необходимости обнаружения целей на догонных курсах для снижения интенсивности спектра отражений боковых лепестков следует уменьшать частоту повторения, т. е. уменьшать число колец дальности, с которых суммируются отражения от земли. При этом можно достичь низкой частоты повторения, обеспечивающей однозначное измерение дальности. Однако за счет снижения Fп нарушается однозначность измерения скорости и, следовательно увеличивается число суммирующихся спектральных составляющих помех от ряда соседних компонент частоты повторения в спектре. Это обстоятельство снова приводит к увеличению интенсивности спектра пассивных помех по боковым лепесткам антенны. Поэтому как компромиссное решение часто используют режим средней частоты повторения, когда достигается минимум интенсивности помех. Для одновременного обнаружения целей на встречных и догонных курсах используют переключение режима излучения с высокой частоты повторения на низкую или среднюю, затем снова на высокую и т. д.
На рис. 10.24 приведена структурная схема РЛС с высокой частотой повторения [8]. Приемопередатчик осуществляет генерацию и излучение через антенну когерентных радиоимпульсов с высокой частотой повторения, а также прием и усиление отраженных сигналов. При этом тракт УПЧ стробируется импульсами от хронизатора для уменьшения просачивания зондирующих импульсов. С выхода УПЧ сигналы подаются на селекторы дальности (СД) для формирования раздельной обработки в каждом канале дальности. Число таких каналов определяется скважностью излучения Q. Селекторные импульсы дальности формируются в ХР в режиме обнаружения и в системе АСД в режиме автосопровождения. Переключение осуществляется переключающей схемой (ПСХ) по сигналам автомата захвата. В каждом канале дальности имеется полосовой фильтр (ПФ) с полосой пропускания порядка Fп/2 и режекторный фильтр (РФ) нулевой доплеровской частоты, обеспечивающие прохождение доплеровских компонент сигналов и подавляющие просачивающийся сигнал передатчика и отражения от поверхности земли с нулевой доплеровской частотой (альтиметровые отражения). После ПФ и РФ сигнал становится непрерывным, поскольку эти фильтры выделяют из спектра сигнала только одну доплеровскую компоненту. Затем следящая система, состоящая из первого и второго смесителей, управляемого гетеродина УП, устройства компенсации движения помехи (КДП) и фильтра главного лепестка (ФГЛ), осуществляет режекцию интенсивных отражений от земли по главному лепестку. Вторая следящая система, в которую входят управляемый гетеродин УГ2, третий смеситель, усилитель (У), фильтр (Ф) и экстраполятор (ЭКСТ), образуют автоматическую систему сопровождения по скорости (АСС). С выхода АСС сигналы направляются для сопровождения цели по дальности и угловым координатам на системы АСД и АСН. Система АСН через схему управления антенной (УА) и привод сопровождает цель по направлению. Кроме того, к выходу У подключена фильтровая система (ФС) (см. гл. 2), образующая каналы скорости обнаружителя. Выходы всех каналов скорости и дальности объединяются и подаются на индикатор (И).
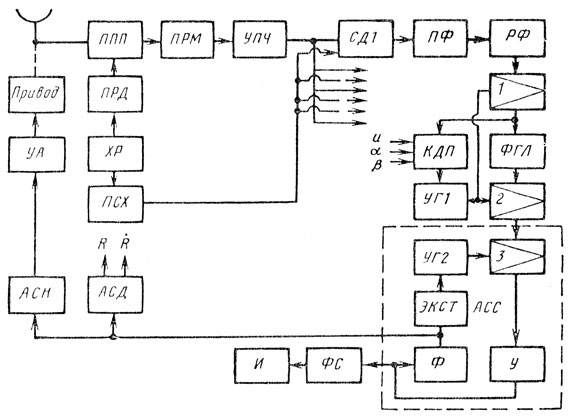
Рис. 10.24
Построение РЛС с высокой и средней частотами повторения в значительной степени зависит от того, каким образом решаются задачи дальнометрии, устранения неоднозначности по дальности и "слепых" дальностей. Как указывалось в гл. 2, в этих случаях можно использовать вобуляцию частоты повторения, т. е. осуществлять дальнометрию на нескольких частотах повторения, затем идентифицировать отметки цели при различных частотах повторения и тем самым разрешать неоднозначность по дальности. Кроме того, возможно использовать дополнительную модуляцию зондирующего сигнала модулирующим, частота которого выбрана для целей однозначной дальнометрии. Тогда, применяя частотный или фазовый метод дальнометрии, можно разрешить неоднозначность отсчета дальности при высокой частоте повторения.
На рис. 10.25 приведена структурная схема РЛС с высокой частотой повторения с модуляцией несущей частоты гармоническим сигналом [10]. Приемопередатчик формирует последовательность когерентных радиоимпульсов с частотной модуляцией несущей по гармоническому закону с частотой модуляции, обеспечивающей однозначность дальнометрии. Несущая частота, промежуточная и частота модуляции получаются из колебаний стабильного задающего генератора путем умножения и деления его частоты.
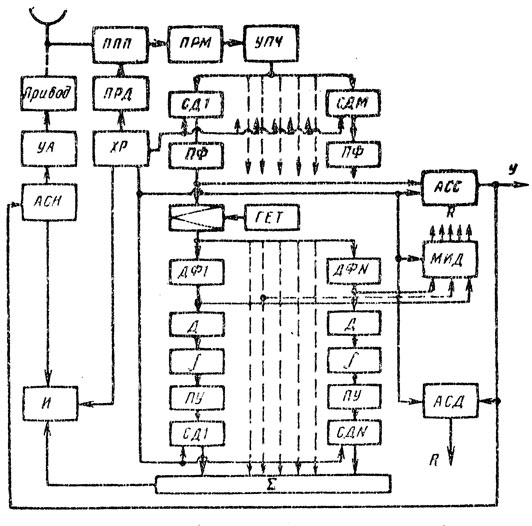
Рис. 10.25
С выхода УПЧ приемника импульсы отраженного сигнала подаются на селекторы дальности (СД), образующие каналы дальности, число которых равно скважности излучения. В каждом канале дальности включен полосовой фильтр (ПФ) с полосой, несколько меньшей Fп/2, и режекторный фильтр подавления (ФП) отражений по главному лепестку антенны, превращающие импульсный сигнал в непрерывный. После преобразования сигнала с помощью смесителя и гетеродина (ГЕТ) на вторую промежуточную частоту в каждом канале дальности он подается на фильтровую систему, состоящую из доплеровских фильтров (ДФ), после которых включены детекторы (Д), интеграторы, пороговые устройства (ПУ) и селекторы дальности (СД). Выходные сигналы всех каналов скорости и дальности суммируются и подаются на И.
В каждом канале дальности имеется многоканальный измеритель дальности (МИД). Принцип его работы заключается в том, что сигнал с каждого доплеровского фильтра подается на частотный дискриминатор, где и выделяются колебания частоты модуляции из отраженного сигнала. Затем эти колебания сравниваются по фазе на фазовых детекторах с опорным сигналом частоты модуляции, поступающим из хронизатора. Выходные напряжения фазовых детекторов пропорциональны дальности целей, отселектированных по скорости.
Перевод системы на автоматическое сопровождение цели осуществляется после захвата цели по скорости с помощью системы АСС. Первоначально производится поиск по скорости в заданном диапазоне скоростей или доплеровских частот. После захвата цели осуществляется ее сопровождение с использованием сигнала ошибки, полученного с частотного дискриминатора системы АСС. С выхода АСС сигнал на частоте модуляции подается на АСД, где следящий фазометр определяет разность фаз на частоте модуляции отраженного и опорного сигналов.
При использовании конического сканирования для АСН напряжение, поступающее на АСС, модулировано по амплитуде частотой сканирования. Эта модуляция сохраняется в колебании и на выходе системы АСС, а в системе АСН с помощью детектора огибающей и фильтра частоты сканирования из него выделяется сигнал ошибки на частоте сканирования, который сравнивается на фазовом детекторе с опорным сигналом генератора опорных напряжений (рис. 10.22).
В [102] приводятся сведения об обработке сигнала в самолетном радиолокаторе, в котором осуществлен принцип одновременной работы с высокой (200 кГц) и средней (10 кГц) частотами повторения на несущей частоте 10 ГГц. Используется плоская антенная решетка с малым уровнем бокового излучения. В передатчике применена ЛБВ с управляющей сеткой, позволяющая изменять режимы излучения и вид зондирующего сигнала в широких пределах. Наконец, быстродействующая ЦЭВМ обеспечивает управление режимами работы РЛС, а для обработки информации используется блок цифровой обработки сигналов.
Сканирование луча антенны осуществляется по строчному методу двумя циклами, причем четные и нечетные строки проходятся лучом в противоположных направлениях. Частота повторения от строки к строке меняется с высокой на среднюю и наоборот. Циклы отличаются порядком изменения частоты повторения при переходе с четных на не четные строки, так что за два цикла режимы ВЧП и СЧП используются для просмотра всего пространства, обеспечивая всеракурсное обнаружение целей.
На рис. 10.26 показана структурная схема канала обработки при высокой частоте повторения (а) и иллюстрируется доплеровская фильтрация в этом режиме (б). Фильтр (Ф) перекрывает диапазон частот внутри интервала Fп, свободный от спектральных составляющих пассивных помех. Два фильтра поддиапазонов (ФПД1 и ФПД2) разбивают участок частот, свободный от помех, на два равных поддиапазона. Одновременно в каналах этих фильтров производится раздельная автоматическая регулировка усиления. Сигналы с выходов каналов фильтров ФПД1 и ФПД2 подаются на АЦП. Полное ослабление сигналов помех по главному лепестку в тракте обработки с помощью аналоговых и цифровых фильтров достигает 80 дБ. Блок весовой обработки (ВО), запоминающее устройство (ЗУ) и блок БПФ осуществляют доплеровскую фильтрацию с помощью 512 цифровых доплеровских фильтров (ЦДФ). Малый уровень боковых лепестков обеспечивается за счет весовой обработки цифровых сигналов. В дальнейшем сигналы подаются на амплитудный детектор (АД) и обнаруживаются с заданным уровнем ложных тревог в пороговом устройстве (ПУ). Результат обнаружения используется для определения дальности цели при изменении частоты по закону симметричной пилы в блоке измерения дальности (ИД), и координаты цели запоминаются в цифровом преобразователе развертки (ЦПР) для последующей подачи на телевизионный индикатор (И).
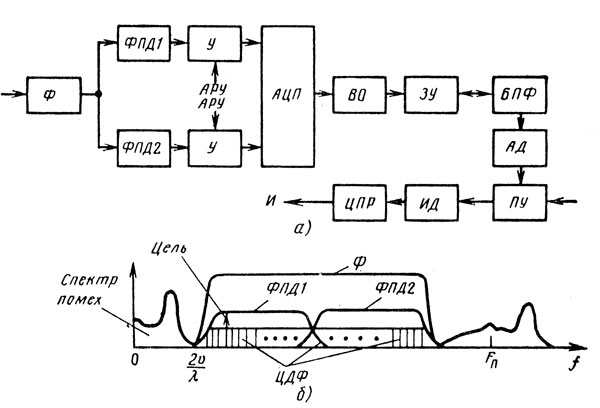
Рис. 10.26
На рис. 10.27 показана структурная схема канала обработки при использовании средней частоты повторения (а) и иллюстрируется доплеровская фильтрация (б) в этом случае.
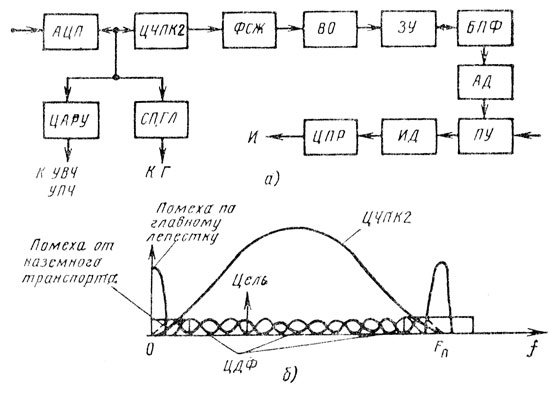
Рис. 10.27
Преобразованный в цифровую форму с помощью 9-разрядного АЦП сигнал обрабатывается в 64 каналах дальности, в каждом из которых имеется 16 доплеровских фильтров. Преобразователь охвачен петлей цифровой АРУ, предохраняющей его от насыщения и воздействующей на усиление трактов высокой и промежуточной частоты. Управляя частотой гетеродинов, схема подавления помехи по глазному лепестку (СПГЛ) совмещает максимум спектра помех с нулевой частотой. Для предварительного ослабления помехи используется цифровое двухкратное череспериодное вычитание ЦЧПК2.
Полное ослабление помех в тракте обработки достигает 55 дБ. После ЦЧПК2 осуществляется сжатие ЛЧМ импульсов с коэффициентом сжатия 13. Блоки ВО, ЗУ и БПФ производят обработку так же, как и в случае работы с высокой частотой повторения. Различие лишь в том, что в диапазоне частот, равном Fп, формируется 16 цифровых фильтров, но из них используется только девять, поскольку исключаются те, которые попадают в зону помех от наземного транспорта (диапазон частот ±2 кГц). Работа блоков ПУ, ИД и ЦПР описана выше.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'