
13.9. Z-преобразование временных функций
Основываясь на приведенных в § 13.5 дискретных преобразованиях Лапласа, составим аналогичные выражения для z-преобразований, подставляя ерТ = z.
Выражение (13.15) принимает вид

называемое прямым z-преобразованием.
Найдем функцию Sˆ(z) для некоторых простых временных функций sT(t).
1. Последовательность выборок из сигнала s(t) = 1, t ≥ 0. В этом случае s(kТ) = 1, k = 0, 1, 2, ..., ∞, и в соответствии с (13.48)

Нуль z0 = 0, полюс zп = 1.
2. Последовательность выборок из сигнала  В этом случае
В этом случае  и
и

Нуль z0 = 0, полюс 
3. Последовательность выборок из сигнала s(t) = aαt, t ≥ 0, a < 1. В этом случае s(kT) = e-αkT и
Нуль z0 = 0, полюс 
4. Последовательность выборок из сигнала s(t) = cos ω0 T, t ≥ 0. В этом случае  и
и
Нули: z01 = 0, z02 = cos ω0T, полюса: 
5. Последовательность выборок из сигнала s(t) = sin ω0t, t ≥ 0. В этом случае  и
и
Нуль z0 = 0, полюса: 
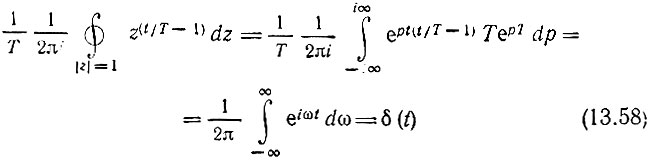
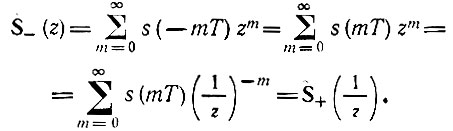
Положение нулей и полюсов для приведенных выше пяти сигналов показано на рис. 13.20.
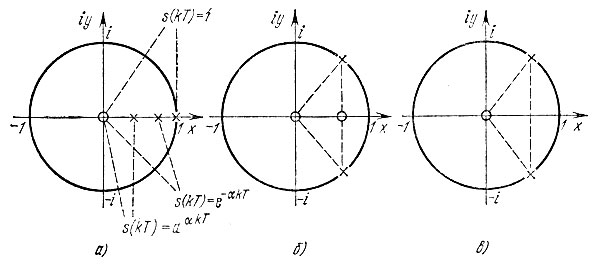
Рис. 13.20. Положение нулей и полюсов на z-плоскости для:

Отыскание оригинала, т. е. функции sT(t), по заданному изображению Sˆ(z) производится с помощью обратного z-преобразования, которое получается подстановкой ерТ = z в выражение (13.16).
С учетом соотношения  это выражение приводится к виду
это выражение приводится к виду

Интегрирование ведется по окружности радиуса r = есТ, в которую преобразуется прямая σ = с из плоскости р = σ + iω. Постоянная с определяется из условия, что все полюса подынтегральной функции находятся внутри круга радиуса r = есТ. Обход контура - в положительном направлении (против часовой стрелки). Изменению частоты от -∞ до ∞ соответствует бесконечное число обходов контура интегрирования.
По аналогии с выражением (13.19) значение импульса s(nТ) в точке t = nТ [без множителя δ(t - nТ)] можно определить с помощью более простого выражения

в котором подразумевается один обход контура интегрирования.
В рассмотренных выше примерах функций S(z), обладающих полюсами на окружности единичного радиуса [при s(kT) = 1, cos ω0kT, sin ω0kT], постоянная с > 0 может быть сколь угодно малой величиной. Поэтому контур интегрирования можно свести к окружности радиуса r = 1 с обходом полюсов вне круга, подобно тому, как на плоскости р = σ + iω интегрирование ведется по оси iω с обходом полюсов, лежащих на этой оси, справа.
С учетом этого условия, выражения (13.54), (13.55) в дальнейшем будем записывать в одной из двух форм:

- с бесконечным числом обходов окружности единичного радиуса;

- с одним обходом окружности единичного радиуса.
Интегрирование по окружности r > 1 из дальнейшего рассмотрения исключается, поскольку положение полюсов функции S(z) вне круга r > 1 соответствует неограниченно возрастающим временным последовательностям, не имеющим физического смысла.
При применении выражения (13.56) следует учитывать полезное соотношение
[см. выражение (3.17)].
Приведем в заключение двустороннее z-преобразование, получающееся подстановкой ерT в (13.23):

При четной функции s(t) второе слагаемое в правой части (13.59) можно привести к виду
Таким образом, при четной функции s(t) выражение (13.59) переходит в

В этом выражении Sˆ+ обозначает одностороннее преобразование. Обратное z-преобразование производится с помощью выражений (13.56), (13.57).

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'