
Глава V. Основы теории нелинейных систем автоматического управления
В предыдущих главах нами рассматривались лишь линейные системы автоматического управления. Однако кибернетические системы нелинейны.
Нелинейности, имеющиеся в системе, распадаются на два основных типа: нелинейности, присущие элементам системы, и нелинейности, вводимые в систему управления для улучшения ее характеристик. К первым относятся насыщение (рис. 5.1), люфт, температурная зависимость и т. д. Ко вторым - нелинейные элементы и нелинейная обратная связь.
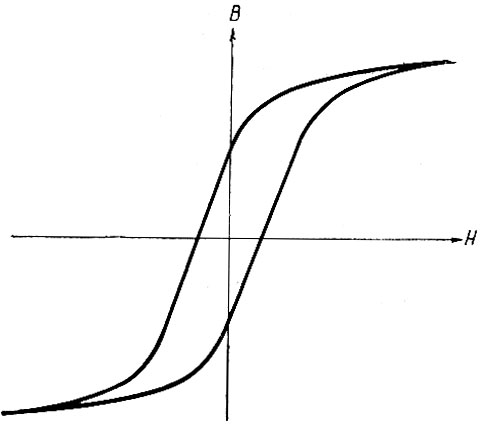
Рис. 5.1. Характеристика ферромагнитных элементов
Так, например, на рис. 5.2 показана характеристика системы, осуществляющей поиск экстремальной точки (u2m; u1m). Как следует из этой характеристики, в систему автоматического управления введены нелинейные элементы, благодаря которым представляется возможным осуществить такую схему автоматического управления объектом, которая работает в области экстремума (подробнее об этом будет сказано в следующей главе).
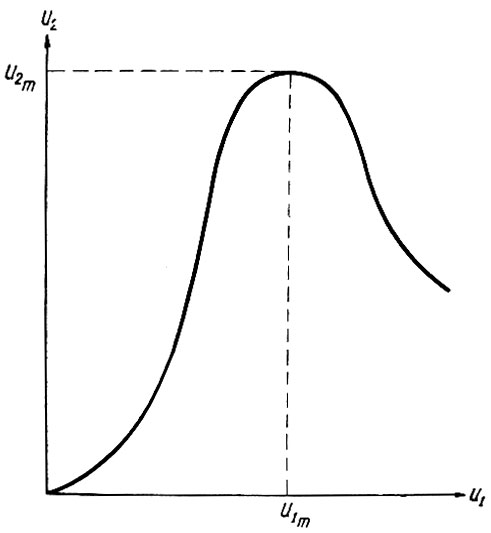
Рис. 5.2. Характеристика экстремальной системы
Нелинейная система существенно отличается от линейной. Для этой системы уже неприемлем принцип суперпозиций. Кроме того, спектр напряжения на выходе нелинейной системы отличается от спектра напряжения, подаваемого на ее вход. В нелинейной системе устойчивость ее работы зависит уже не только от величины напряжения на входе, но и от начальных условий. Причем передаточная функция нелинейной системы становится зависимой от входного напряжения.
Вследствие этого учет нелинейности характеристик систем автоматического управления является чрезвычайно трудоемким, ибо здесь приходится сталкиваться с решением сложных нелинейных дифференциальных уравнений высоких порядков. В большинстве же случаев решение этих уравнений в общем виде аналитически не может быть проведено. Поэтому приходится довольствоваться решением ряда частных случаев этих уравнений, выполняемых с той или иной степенью точности.
В настоящее время существует большое число методов исследования нелинейных систем. Ниже мы остановимся только на некоторых важнейших из них.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'