
Глава VI. Самонастраивающиеся системы автоматического управления
1. Общие понятия
До последнего времени в различных отраслях народного хозяйства использовались только так называемые обычные системы автоматического управления, которые осуществляли поддержание неизменным какого-либо из параметров объекта управления. Задачей таких систем управления являлось определение отклонения регулируемого параметра от номинального значения и устранения получающейся ошибки.
Одна из простейших обычных систем показана на рис. 6.1. Эта система состоит из измерительного устройства (нелинейного мостика) и магнитного усилителя (М). Объектом управления является синхронный генератор, напряжение которого (uг) необходимо поддерживать постоянным.
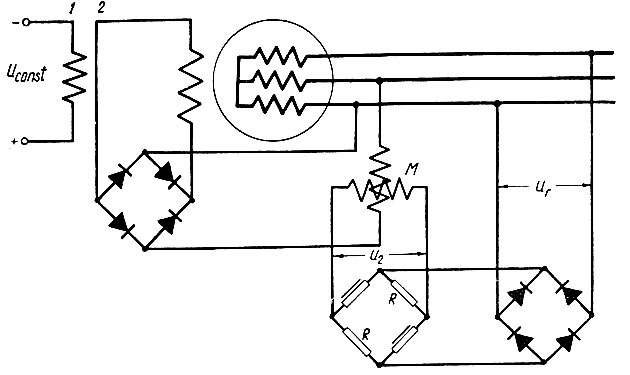
Рис. 6.1. Система регулирования напряжения синхронного генератора
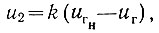
В мостике измерительного устройства установлено два линейных сопротивления (R) и два нелинейных элемента (стабилотрон, термистор и т. д.), сопротивления которых изменяются в зависимости от проходящего через них тока. Благодаря этому характеристика измерительного устройства имеет вид кривой, показанной на рис. 6.2. Рабочая часть этой характеристики (сплошная линия) математически записывается в следующем виде:
 (6.1)
(6.1)где k = tg α - коэффициент усиления;
uгн - номинальное значение напряжения генератора.
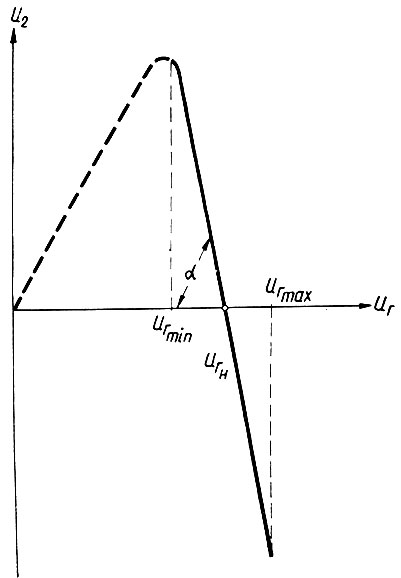
Рис. 6.2. Характеристика измерительного устройства
Рассматриваемая система работает следующим образом. В режиме номинального напряжения необходимый ток возбуждения создается первой (1) обмоткой возбуждения генератора, на которую включено постоянное напряжение (uconst). В этом режиме напряжение генератора равно номинальному и (ур. 6.1) напряжение на выходе измерительного устройства отсутствует. Поэтому магнитный усилитель заперт, и ток по второй (2) обмотке возбуждения генератора не проходит (током холостого хода пренебрегаем).
Если по каким-либо причинам (например, включение нагрузки) напряжение генератора уменьшится, то на выходе измерительного устройства появится напряжение (ур. 6.1), пропорциональное отклонению напряжения генератора от номинального значения. Благодаря этому сопротивление магнитного усилителя уменьшится, и во второй обмотке возбуждения появится ток, который сократит до допустимого минимума отклонение напряжения от номинального значения.
Появление технической кибернетики способствовало быстрому развитию нового типа систем автоматического управления, которые получили название самонастраивающихся. Эти системы получили такое название потому, что они обладают способностью к самонастройке. Если обычные системы управления имели строго определенный закон регулирования (например, ур. 6.1) и обеспечивали постоянство какого-либо параметра, то самонастраивающиеся системы предназначены для решения значительно более сложных задач, требующих в процессе управления автоматического самоизменения закона регулирования.
В большинстве случаев самонастраивающиеся системы применяются для обеспечения экстремальных (максимальных или минимальных) значений заданных параметров объектов управления.
Так, например, перед системой автоматического управления химическим процессом может быть поставлена задача так управлять этим процессом, чтобы обеспечить получение максимального количества выходного продукта (естественно, при заданном его качестве) при минимальном расходе сырья, из которого этот продукт получается.
Такие системы получили название экстремальных. Параметры, оптимальное значение которых ищется, также называются экстремальными.
Экстремальные самонастраивающиеся системы могут быть двух типов: системы с изменяющейся структурой (схемой) и системы с постоянной структурой. Поскольку системы с изменяющейся структурой еще слабо изучены, то ниже мы рассмотрим только экстремальные системы с неизменной структурой. Причем рассмотрение вначале ограничим задачами, в которых регулируемый параметр имеет только одно экстремальное значение, зависящее только от одной независимой переменной величины.
Простейшую схему самонастраивающейся системы можно получить введением дополнительного элемента в обычную систему автоматического управления, осуществляющую регулирование по отклонению какого-либо параметра от заданной величины. Этот элемент (К) может быть включен либо в основную цепь объекта управления (рис. 6.3), либо в цепь обратной связи объекта. Элемент К выполнен так, что он может менять свои параметры R зависимости от сигнала управления, даваемого логическо-вычислительным устройством. В свою очередь логическо-вычислительное устройство измеряет параметры на входе и выходе системы, перерабатывает полученную информацию и управляет элементом К так, чтобы при любом изменении как характеристик объекта управления, так и внешних условий было обеспечена экстремальное значение заданного параметра.
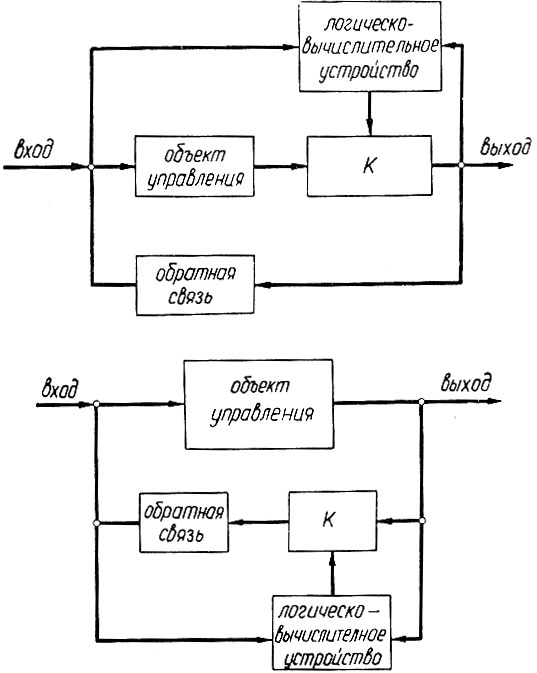
Рис. 6.3. Простейшие схемы самонастраивающихся систем
Следует иметь в виду, что самонастраивающиеся системы имеют сложную логику и всегда нелинейны. Поэтому их анализ, и синтез представляет собой очень сложную задачу.
Прежде чем перейти к рассмотрению самонастраивающихся систем автоматического управления, познакомимся с системой, имеющей фиксированный во времени экстремум, и с программной системой управления. Эти системы значительно проще систем с самонастройкой. Поэтому необходимо знать область их применения, чтобы использовать более сложные самонастраивающиеся системы в том случае, когда поставленная задача не может быть решена при помощи двух указанных типов систем. Кроме того, изучение некибернетических экстремальных систем позволит лучше понять устройство и принцип действия: самонастраивающихся систем автоматического управления.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'