
5. Системы, реагирующие на знак производной
Стремление к созданию экстремальных систем без дифференцирующих блоков, вносящих большую ошибку, привело к появлению систем автоматического управления, реагирующих не на производную, а на ее знак.
Рассмотрим принцип действия этой системы на примере дизель-генератора, коэффициент полезного действия которого необходимо все время поддерживать максимальным.
В зависимости от количества подаваемого топлива (q) коэффициент полезного действия (η) изменяется в соответствии с кривой, показанной на рис. 6.9. Эта кривая в результате изменения параметров дизель-генератора сдвигается во времени (дрейфует) неизвестным нам образом. Однако будем считать, что это передвижение кривой происходит значительно медленнее, чем работает система управления. Более того, первоначально примем, что все элементы системы безынерционны. Поэтому систему управления можно создавать для поиска экстремума статической (неподвижной во времени) кривой η = f(q).
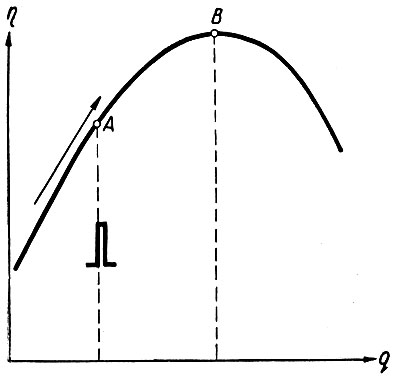
Рис. 6.9. Характеристика регулируемого параметра
Попытаемся выяснить, как, зная только знак производной  можно обеспечить работу дизель-генератора при максимальном коэффициенте полезного действия.
можно обеспечить работу дизель-генератора при максимальном коэффициенте полезного действия.
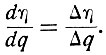
Прежде всего необходимо отметить, что производная заменяется отношением конечных приращений:
Предположим далее, что вращающийся электрический двигатель открывает кран топливоподачи, благодаря чему количество топлива возрастает. Если при этом возрастает и коэффициент полезного действия, то это значит, что дизель-генератор работает на левой части характеристики (рис. 6.9) и движется к экстремальной точке.
Однако после того, как при увеличении η экстремальная точка будет достигнута, коэффициент полезного действия начнет уменьшаться. Поэтому в тот момент, когда при возрастании q коэффициент полезного действия (η) от возрастания переходит к уменьшению, необходимо осуществить реверс электрического двигателя, т. е. заставить его вращаться в обратную сторону.
Легко увидеть (рис. 6.9), что если при уменьшении q коэффициент полезного действия после возрастания также начнет уменьшаться, то необходимо вновь произвести реверс двигателя.
Таким образом, в системе автоматического управления для обеспечения экстремума необходимо осуществлять реверс топливоподачи всякий раз, как только приращение Δη меняет свой знак. Это логическое действие и является основой работы рассматриваемого типа систем.
Схема самонастраивающейся системы, реагирующей на знак производной, показана на рис. 6.10.
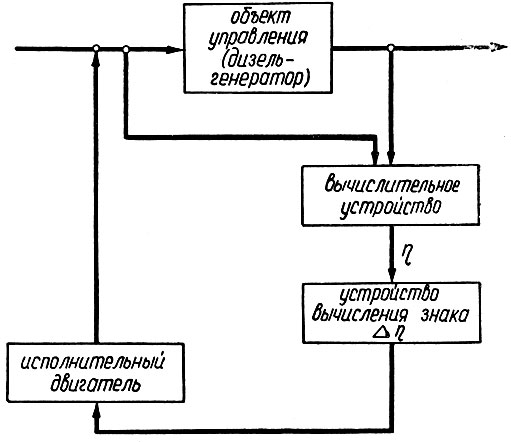
Рис. 6.10. Система, реагирующая на знак производной
В этой схеме имеется вычислительное устройство, которое, получая сигналы со входа и выхода объекта управления, подсчитывает величину коэффициента полезного действия (η).
Следует отметить, что в самонастраивающихся системах выход вычислительного устройства, определяющего экстремальный параметр (в нашей схеме - η), называется выходом системы. Тем самым вычислительное устройство считается как бы неотделимой частью объекта управления. Поэтому, употребляя далее термин "выход системы", мы будем его понимать именно в этом смысле.
Выход системы (рис. 6.10) подается на устройство, которое определяет знак Δη и в момент его изменения осуществляет реверс исполнительного двигателя, управляющего краном топливоподачи.
Одна из схем, позволяющая определить знак приращения Δη, показана на рис. 6.11. Поскольку в этой схеме моторчик постоянного тока имеет неизменный (по направлению и величине) ток возбуждения, то его скорость пропорциональна напряжению, поданному на его якорь. Следовательно, при k1η > k2, скорость вращения двигателя равна
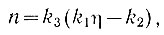
где k3 - коэффициент пропорциональности.
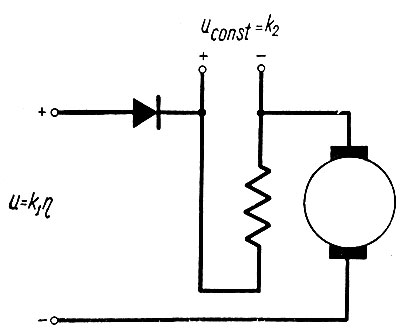
Рис. 6.11. Определение знака приращения
Эта характеристика показана на рис. 6.12. Наличие в схеме (рис. 6.11) вентиля позволяет срезать ненужную отрицательную ветвь этой характеристики (прерывистая прямая).
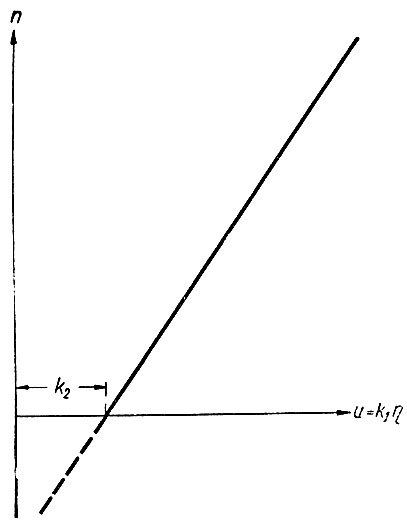
Рис. 6.12. Характеристика устройства
Установим на вращающемся роторе этого моторчика центробежный переключатель, который будет включаться всякий раз, как только скорость двигателя после увеличения начнет уменьшаться. Уменьшение скорости вращения моторчика произойдет тогда, когда начнется уменьшение коэффициента полезного действия. Поэтому центробежный переключатель может быть использован в качестве аппарата, дающего сигнал реверса двигателя, управляющего топливоподачей. Переключатель включается в схему, показанную на рис. 6.13. В данной схеме центробежный переключатель (П) подает напряжение на катушки (К1 и К2) двух шаговых искателей, переключающих полярность обмотки возбуждения исполнительного двигателя и тем самым осуществляющих при каждом срабатывании переключателя реверс двигателя, управляющего топливоподачей.
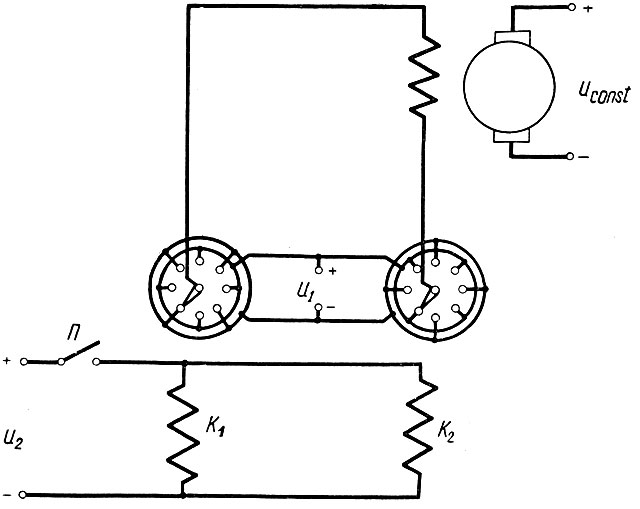
Рис. 6.13. Схема реверса исполнительного двигателя
Рассмотрим работу системы начиная с момента, когда включается исполнительный двигатель и количество топлива (q) начинает возрастать (от нуля). Одновременно с этим (рис. 6.9) увеличивается коэффициент полезного действия (η).
После достижения экстремальной точки (В) коэффициент полезного действия начинает уменьшаться. Поэтому в схеме (рис. 6.13) срабатывает переключатель П, и шаговый искатель поворачивается на одно деление, меняя полярность тока в обмотке возбуждения исполнительного двигателя. Вследствие этого двигатель реверсируется и начинает уменьшать топливоподачу (q). Поэтому коэффициент полезного действия вновь возрастает, но после прохождения экстремальной точки начинает уменьшаться. В этот момент опять срабатывает переключатель, реверсируя исполнительный двигатель. Количество топлива начинает вторично возрастать; одновременно увеличивается η.
Таким образом, система все время находится в режиме поиска экстремальной точки. Совершаемые при этом поисковые колебания (отклонения от экстремальной точки) называются рысканием системы. Во время рыскания система как бы следит за уходом экстремальной точки и принимает нужные логические действия для движения в направлении экстремума.
Следует иметь в виду, что рассмотренная система имеет один очень существенный недостаток, который заключается в следующем.
Например, при увеличении q система оказалась в точке А (рис. 6.9). В соответствии с экстремальной характеристикой в этой точке реверс q не нужен, ибо η возрастает. Пусть теперь в этот момент на выходе системы появится и исчезнет помеха в виде импульса. Исчезновение импульса (уменьшение напряжения) для схемы, показанной на рис. 6.10, равносильно уменьшению η. Следовательно, переключатель П сработает и осуществит реверс топливоподачи. В соответствии с этим q станет уменьшаться, и система не сможет дальше нормально работать.
Для устранения этого недостатка в систему вводят дополнительные устройства, позволяющие ей производить время от времени самоконтроль своей работы.
Одно из таких устройств показано на рис. 6.14. В цепь управления катушек (K1 и К2) шаговых искателей (рис. 6.13) последовательно с контактами переключателя П включается реле времени (S). Это реле имеет нормально замкнутый контакт, отключающийся через τ секунд после включения переключателя П и почти мгновенно включающийся при отключении этого переключателя.
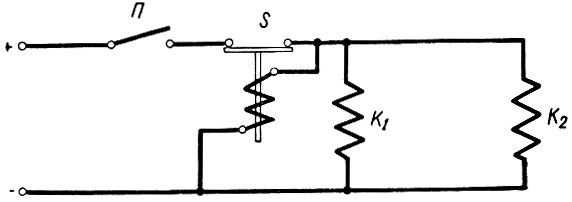
Рис. 6.14. Схема самоконтроля системы
Время выдержки реле (τ) выбирается таким, чтобы при нормальной работе (при рыскании) системы реле не успевало бы срабатывать. Если же в результате неправильной работы системы q слишком долго изменяется в одну сторону (возрастает или уменьшается), то реле срабатывает: его контакт отключается и вновь включается. Поэтому шаговые искатели переключаются на следующие контакты, осуществляя реверс q. В результате этого нормальная работа системы восстанавливается.
Рассмотрим еще одну возможность создания экстремальной системы при помощи определения знака приращения Δη.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'