
7. Системы шагового типа
Принцип действия систем этого типа основан на том, что через определенные интервалы времени, называемые шагами, измеряются значения экстремального параметра. Затем происходит сравнение значений, полученных в начале и конце каждого интервала (шага). Если окажется, что в течение рассматриваемого периода экстремальный параметр уменьшился, то в системе осуществляется реверс входного параметра (q). В противном случае реверс не производится.
Величина выбираемого шага (Δt) ограничивается тем, что при очень большом шаге в системе могут появиться ошибки из-за наличия дрейфа (ухода) экстремальной характеристики. С другой стороны, при слишком малой величине шага на правильность работы системы могут оказать влияние высокочастотные помехи, возникающие в системе или приходящие в нее извне.
Рассмотрим шаговую систему, как и предыдущие типы систем, на примере дизель-генератора, экстремальным параметром которого является коэффициент полезного действия. Схема этой системы показана на рис. 6.16.
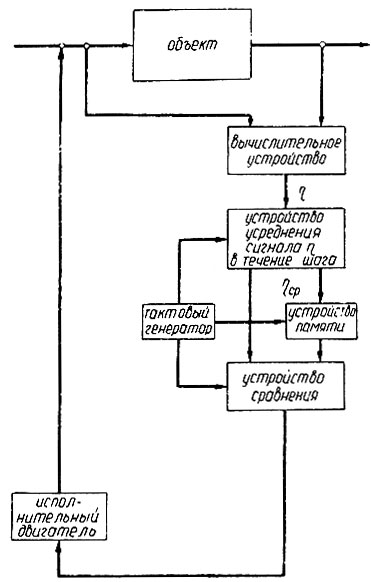
Рис. 6.16. Шаговая система
В этой схеме определение экстремального параметра η, как и в предыдущих схемах, производится вычислительным устройством. Поскольку в течение шага η непрерывно изменяется, то на выход вычислительного устройства включается блок усреднения, который выдает среднее за шаг значение (ηср). На устройства усреднения, памяти и сравнения включен тактовый генератор, дающий сигналы через определенные интервалы времени (Δt).
Программа работы этих устройств при подаче сигналов от тактового генератора показана в табл. 6.1 (1-й такт дается через Δt секунд после включения дизель-генератора).
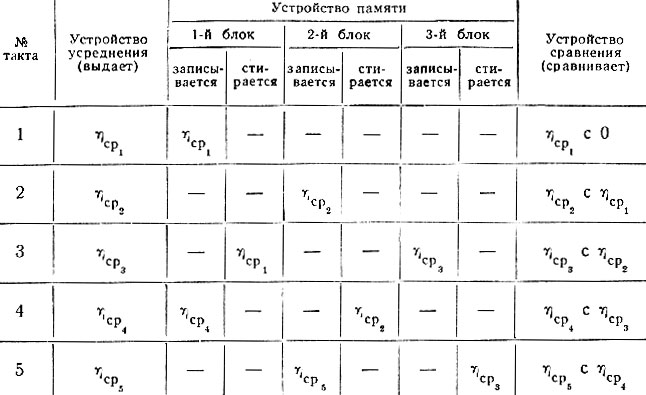
Таблица 6.1
Как следует из табл. 6.1, в первом такте (поскольку система только начинает работу) ηср1 сравнивается с нулем. В последующих же тактах выполняется сравнение текущего ηсрi с предыдущим его значением (ηсрi-1). В том случае, когда выполняется неравенство
система продолжает свое нормальное движение. Если же это неравенство нарушено, то в системе осуществляется реверс исполнительного двигателя.
Как следует из таблицы 6.1, устройство памяти состоит из трех блоков, которые работают по очереди в циклическом порядке (1-2-3-1 и т. д.).
Рассмотрим некоторые характеристики шаговой системы. При этом для упрощения изложения примем, что скорость изменения топлива  остается все время постоянной.
остается все время постоянной.
Прежде всего отметим следующее обстоятельство (рис. 6.17). Устройство усреднения определяет среднее значение ηсрi в течение i-го шага, но выдает его во время i+1-го шага. Поэтому устройство сравнения исследует не текущее изменение η, а его изменение в течение предыдущего шага. Таким образом, определение положения системы относительно экстремальной точки получается с запаздыванием на один шаг. Наличие устройства усреднения приводит также к тому, что вместо непрерывной кривой η = f(q) фактически исследуется дискретная зависимость η от q.
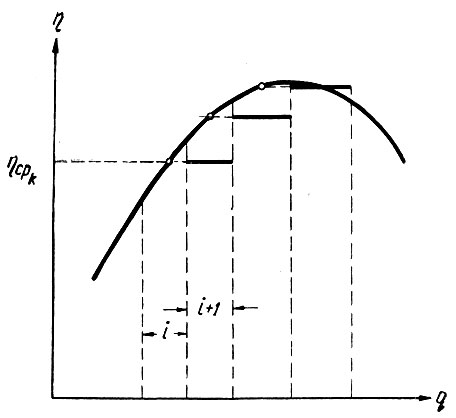
Рис. 6.17. Характеристика работы устройства усреднения
Отложим эту дискретную (ступенчатую) зависимость (рис. 6.18) рядом с графиком q = φ(t). Отметим далее на дискретной кривой зону нечувствительности устройства сравнения. Эта зона получается в результате того, что всегда существует предел разницы ηсрi-1 - ηсрi, на который устройство не может реагировать.
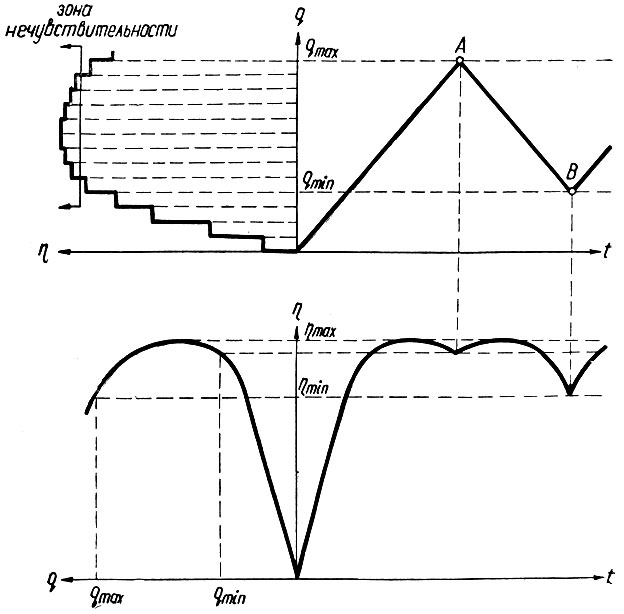
Рис. 6.18. Характеристики шаговой системы
Проследим теперь за изменением количества топлива во времени. Вначале оно возрастает (ранее было принято, что скорость возрастания топлива является постоянной), но в точке А разница ηсрi-1 - ηсрi превысила зону нечувствительности устройства сравнения, в системе осуществляется реверс*, и количество топлива начинает уменьшаться. В точке В система опять осуществляет реверс, и после этого количество топлива вновь увеличивается. Таким образом, количество топлива во время рыскания системы в области экстремальной точки колеблется между qmax и qmin.
* (Следует помнить, что для простоты изложения здесь, как и в предыдущих типах систем, запаздывание, вносимое объектом управления, пока не учитывается.)
Зная характеристики q = φ(t) и η = f(q), можно построить кривую изменения во времени коэффициента полезного действия. Эта кривая показана на нижнем графике рис. 6.18. Как следует из этого графика, из-за рыскания системы коэффициент полезного действия колеблется между максимальной и минимальной величинами. Естественно, что чем меньше зона нечувствительности элемента сравнения и величина шага, задаваемая тактовым генератором, тем меньше и колебания η.
Шаговая система обладает высокой надежностью в работе. Поэтому, несмотря на ее сложность, она имеет наибольшее распространение.
В шаговой системе, как и в других рассмотренных типах самонастраивающихся систем, поиск экстремальной точки осуществляется исследованием влияния изменения основного входного сигнала (количество топлива) на результат действия системы.
Вместе с тем определение положения системы относительно, экстремальной точки может быть выполнено и при помощи дополнительного поискового сигнала, накладываемого на входе системы на основной сигнал. В этом случае поиск экстремальной точки производится на основе исследования дополнительного сигнала, получающегося на выходе системы при подаче на ее вход поискового сигнала.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'