
8. Системы с дополнительным поисковым сигналом
Подадим на вход системы синусоидальный сигнал

Как следует из рис. 6.19, в том случае, когда система работает на левой части экстремальной характеристики (например, в точке 1), фазы колебаний напряжения на входе (u1) и выходе (u2) сдвинуты на 180° (положительной полуволне u1 соответствует отрицательная полуволна u2). В случае же, когда система оказывается на правой части экстремальной характеристики (например в точке 3), фазы напряжений u1 и u2 совпадают.
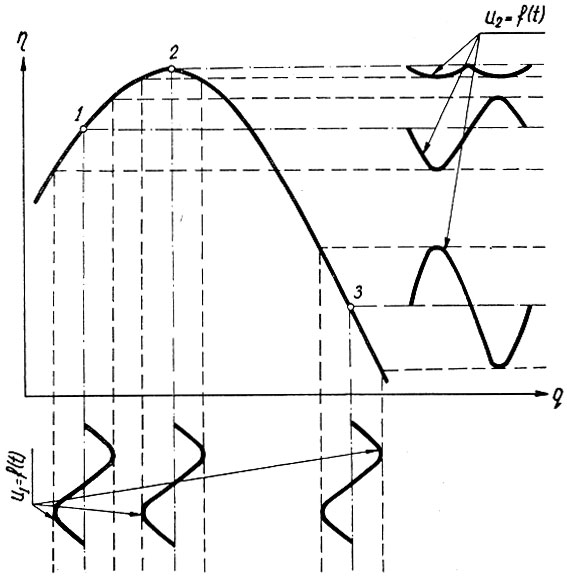
Рис. 6.19. Схема прохождения сигнала через экстремальную систему
В экстремальной точке (2) выходной сигнал не содержит гармоники с частотой (ω) входного сигнала. Поэтому, если на выходе системы установить фильтр, пропускающий только частоту входного сигнала, то, сравнивая фазу полученной гармоники на выходе системы с фазой входного сигнала, можно узнать, на какой части экстремальной характеристики работает система, и, следовательно, в каком направлении необходимо изменять входную величину (здесь - q), чтобы достигнуть экстремальной точки.
Принципиальная схема системы с дополнительным непрерывным поисковым сигналом показана на рис. 6.20. Пусть объектом управления является по-прежнему дизель-генератор, экстремальная характеристика которого показана на рис. 6.19.
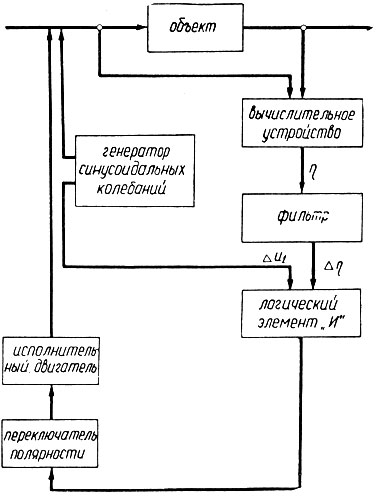
Рис. 6.20. Система с дополнительным поисковым сигналом
В этой схеме вычислительное устройство подсчитывает коэффициент полезного действия дизель-генератора, а фильтр пропускает только синусоидальную составляющую этого коэффициента, имеющую частоту (ω) входного поискового сигнала.
Включим на вход системы генератор синусоидальных колебаний с частотой ω. Тогда, если система не находится в экстремальной точке, на выходе фильтра появится синусоидальное напряжение, равное Δη. Это напряжение, а также напряжение (Δu1), даваемое генератором, включим на входы логического элемента "И".
Одна из схем логического элемента "И" показана на рис. 6.21. Включим на входы элемента сигналы Δu1 и Δη таким образом, чтобы при работе системы на правой части экстремальной характеристики полярности этих сигналов (в течение одного из полупериодов) были такими, как показано на рисунке. Тогда на выходе элемента (Δu1 значительно больше Δη) появится однополупериодное напряжение uИ, которое можно использовать в качестве сигнала реверса. При переходе системы на левую часть экстремальной характеристики фаза напряжения Δη сдвинется на 180° и напряжение на выходе элемента (uИ) станет равным нулю.
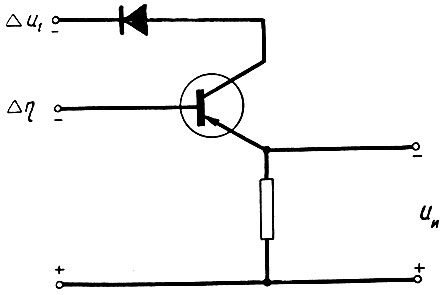
Рис. 6.21. Схема логического элемента 'И'
Выход логического элемента (напряжение uИ) включается на переключатель полярности обмотки возбуждения исполнительного двигателя (рис. 6.22).
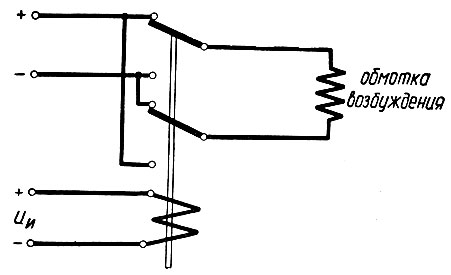
Рис. 6.22. Схема переключения полярности обмотки возбуждения исполнительного двигателя
Рассмотрим теперь, как работает система, показанная на рис. 6.20. Предположим, что мы включаем дизель-генератор. Вначале система окажется на левой части экстремальной характеристики (рис. 6.19). Вращающийся исполнительный двигатель увеличивает количество топлива (q), и система начинает двигаться к экстремальной точке. Как только эта точка будет пройдена, фаза колебаний Δη сдвинется на 180° и на выходе логического элемента появится сигнал реверса (uИ). Под воздействием этого сигнала переключатель (рис. 6.22) включится и полярность тока в обмотке возбуждения изменится на обратную. Поэтому исполнительный двигатель начнет уменьшать количество топлива. После того как опять будет пройдена экстремальная точка, фаза Δη вновь изменится и сигнал uИ исчезнет. В этом случае полярность в обмотке двигателя еще раз изменится и количество топлива опять начнет возрастать.
До сих пор при рассмотрении метода с непрерывным поисковым сигналом мы исходили из того, что объект управления не имеет элементов запаздывания, из-за которых происходит сдвиг фазы напряжения на выходе объекта по отношению к напряжению на его входе. В случае же, когда эти элементы имеются, систему управления нужно дополнить устройством, компенсирующим (уничтожающим) этот сдвиг. В схеме рис. 6.20 такое устройство должно быть включено между фильтром и логическим; элементом.
Поскольку сдвиг фазы, связанный с прохождением сигнала через объект управления, из-за изменения параметров объекта является переменной величиной, то его компенсация связана с определенными трудностями. Это ограничивает область применения систем с непрерывным поисковым сигналом.
Рассмотренная система чаще всего применяется в случае, когда экстремальная характеристика изменяется во времени (дрейфует) скачками. Это вызвано тем, что в системе с дополнительным поисковым сигналом наличие скачков экстремального параметра (η) не приводит к появлению ложного сигнала реверса (если при этом система остается на одной и той же части экстремальной характеристики). В противоположность этому, в шаговой системе дискретное изменение экстремальной характеристики (например, ее небольшой скачкообразный сдвиг) может привести к неправильным действиям системы управления.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'