
10. Влияние запаздывания, вносимого системой, на характеристики экстремального управления
До сих пор при изучении экстремальных характеристик самонастраивающихся систем мы исходили из предположения, что все элементы систем являются безынерционными. Поскольку же реальные системы в большинстве случаев из-за наличия в них индуктивностей и емкостей обладают инерционностью, то рассмотрим, как можно учесть ее влияние.
Для удобства анализа самонастраивающуюся экстремальную систему разделим на ряд частей (рис. 6.25).
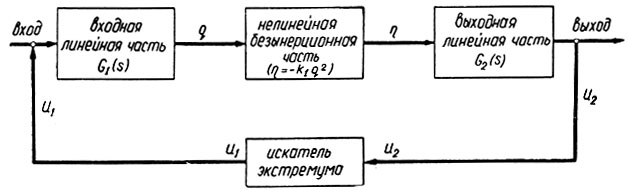
Рис. 6.25. Блок-схема экстремальной самонастраивающейся системы
Как видно из рис. 6.25, система разделена на три части: линейную входную с передаточной функцией G1(s), нелинейную и выходную линейную с функцией G2(s). Причем это разделение сделано так, что все инерционные элементы системы сосредоточены во входной и выходной частях, благодаря чему нелинейная часть является безынерционной.
Входная часть обычно включает исполнительный механизм и входные усилители. Выходная часть, как правило, состоит из выходного блока, сглаживающего фильтра и др. Предполагается также, что искатель экстремума, выполняющий здесь роль цепи обратной связи, является нелинейным, но безынерционным элементом. Задачей этого искателя является создание постоянного по величине и переменного по знаку сигнала (u1):
 (6.11)
(6.11)Следует иметь в виду, что на передаточные функции линейных частей [G1(s) и G2(s)] налагается следующее ограничение. Вносимые ими запаздывания должны быть малы по сравнению с периодом рыскания системы при отсутствии запаздывания. В противном случае нормальная работа системы нарушается.
Поскольку большинство реальных входных и выходных частей системы может быть описано дифференциальными уравнениями первого порядка, то ниже рассматривается только этот случай.
Рассмотрим вначале частный случай, когда запаздывание имеется только на выходе системы. Иначе говоря, примем, что G1(s) = 1. Зависимость входного (q) и экстремального (η) параметров от времени была показана на рис. 6.24. Поскольку в рассматриваемом случае эти функции остаются такими же, повторим их на рис. 6.26. Однако здесь η уже не является выходным параметром системы. При проходе через выходную часть системы сигнал η сглаживается и сдвигается фаза его колебания. Поэтому выходной сигнал системы имеет вид кривой u2 = φ(t), показанной на рис. 6.26.
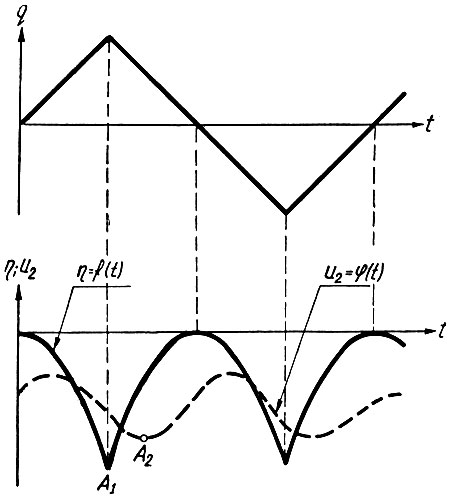
Рис. 6.26. Характеристики экстремальной системы при наличии запаздывания только на входе системы
Следовательно, наличие запаздывания на выходе системы приводит к отставанию минимального значения выходного параметра (u2) системы (точка А2) по сравнению с истинным моментом прохождения минимума экстремальным параметром (точка А1). Это вносит ошибку в определение момента реверса. Поэтому для устранения ошибки необходимо на выход системы включать добавочный элемент, создающий опережение выходного сигнала.
Теперь рассмотрим наиболее общий случай, когда запаздывание имеется как на входе, так и на выходе системы.
В этом случае напряжение на входе системы (u1) (рис. 6.27) в зависимости от сигнала реверса изменяется так же, как q при отсутствии запаздывания (рис. 6.24). Проходя через входную линейную часть, напряжение u1 сдвигается во времени, и его форма приобретает более сглаженный вид [q = F(t)]. Вследствие этого критическое значение экстремальной характеристики [η = f(t)] несколько уменьшается и она получает форму, показанную на рис. 6.27. Функция выхода системы (u2), как и при наличии запаздывания только на выходе системы (рис. 6.26), сдвигается относительно кривой η = f(t) и имеет по сравнению с ней более сглаженную форму.
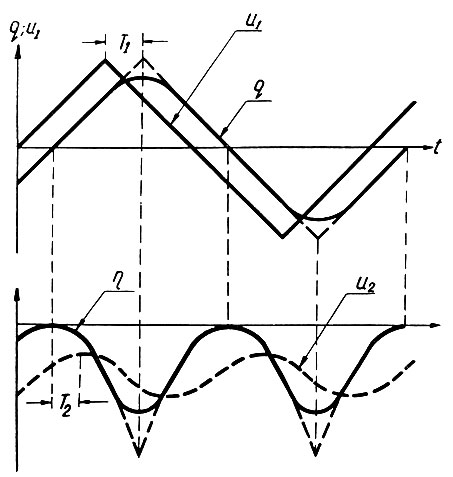
Рис. 6.27. Характеристики системы при запаздывании сигнала на входе и выходе системы
Как показывают расчеты, запаздывание, вносимое как входной (T1), так и выходной (T2) частью системы, примерно равно постоянной времени соответствующей части системы.

При использовании материалов сайта активной гиперссылки обязательна:
http://rateli.ru/ 'Радиотехника'